화성탐사 로버에 어떤 FPGA 적용됐을까
2021-03-31 신윤오 기자, yoshin@elec4.co.kr
화성 탐사 로버 퍼시비어런스와 FPGA는 무슨 관계가 있을까.
미국 항공우주국(NASA)과 제트추진연구소(JPL)의 엔지니어 및 과학자들은 2021년 2월 18일, 화성의 에제로 분화구(Jezero Crater) 지표면에 탐사 로버를 성공적으로 착륙시키는 쾌거를 거두었다.
이 탐사 로버가 사상 처음으로 화성 사진을 촬영할 때 사용된 이미지 프로세싱 최적화를 위한 비전 프로세서와 착륙선의 로버 및 장비에는 자일링스(Xilinx®)의 FPGA가 탑재되어 임무를 수행하고 있다.
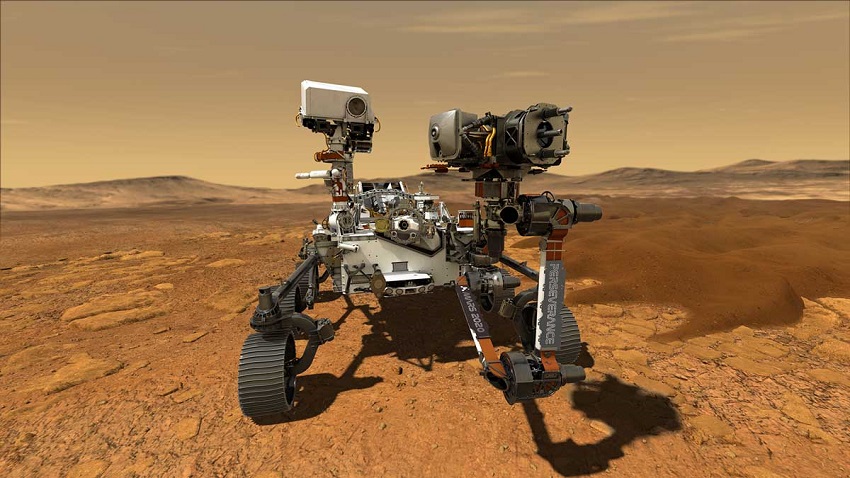
NASA의 퍼시비어런스(Perseverance) 로버는 화성의 생명체 거주 가능성과 존재여부를 확인하고, 미래의 유인탐사에 대비해 화성의 샘플을 가지고 지구로 귀환하는 임무를 수행하기 위해 2020년 7월에 발사되었으며, 이후 7개월 간의 비행 후 에제로 분화구에 성공적으로 착륙했다.
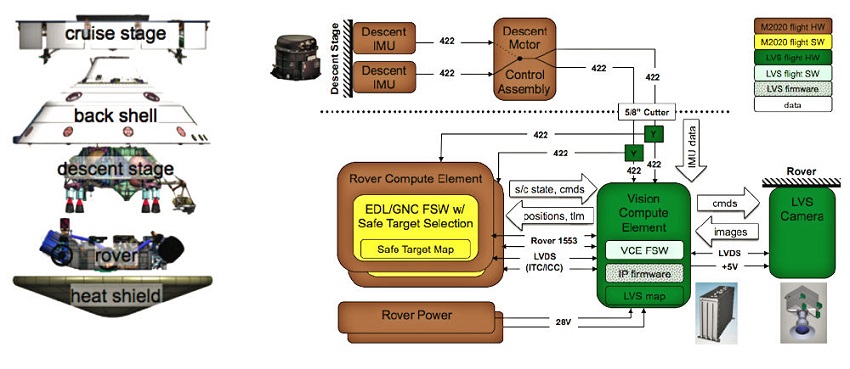
퍼시비어런스 로버는 화성 표면에 착륙하기 위해 내비게이션 및 자율주행을 지원하는 VCE(Vision Compute Element)에 FPGA 기반 하드웨어 가속기를 포함하고 있다. 자일링스의 방사선 경화(Radiation-Hardened) 버텍스-5QVs(Virtex®-5QVs, SIRF)는 영상 보정 및 필터링, 감지 및 매칭 등과 같은 특정 입체영상 및 시각적 작업을 가속화하는데 사용되는 컴퓨터 비전 가속기 카드(CVAC: Computer Vision Accelerator Card)에서 재프로그래밍이 가능한 비주얼 프로세서 역할을 수행한다.
내비게이션 및 자율주행 지원하는 하드웨어 가속기
또한 로버에 탑재된 장비 중 하나인 마스트캠-Z(Mastcam-Z) 다중 스펙트럼 입체 영상 기기는 MSL(Mars Science Lab) 아키텍처 기반의 디지털 박스에 방사선 내성 버텍스-II FPGA(XQR2V3000)를 사용하고 있으며, 유기물과 광물질을 탐사하는 셜록(SHERLOC: Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals) 분광계는 카메라 시스템에 XQR2V3000 FPGA를 통합하고 있다.
화성 탐사 임무에 자일링스 솔루션이 탑재된 것은 이번이 처음이 아니다. NASA의 오퍼튜니티(Opportunity) 로버는 화성에서 90일 동안 머무를 수 있도록 설계되었지만, 지구 시간으로 15년 동안 성공적으로 화성 표면을 탐사한 후 2019년 2월 13일 임무를 종료했다. 이번 NASA의 화성 탐사 프로그램은 지금까지 가장 성공적인 탐사 임무 중 하나로 기록되었다. 자일링스는 제트추진연구소 팀과 함께 이러한 역사적 임무에 참여하게 된 것을 자랑스럽게 생각한다.
NASA 엔지니어들은 화성 탐사 로버의 정교한 발화 시퀀스를 밀리초 단위로 조정해야 하는 착륙선의 파이로(Pyro) 스위치 인터페이스 시스템의 핵심 요소로 FPGA를 사용했다. 또한 NASA는 화성 탐사 로버의 모터 제어 보드에 XQVR1000을 적용하여 바퀴와 스티어링, 팔, 카메라 및 다양한 장비의 모터를 감독하여 탐사 로버가 곳곳에 침전물이 쌓여 있는 화성의 지표면을 이동하면서 다양한 장애물을 극복할 수 있도록 했다.
화성으로 떠난 또 다른 탐사 로버는 ‘큐리오시티(Curiosity)’라고 불리는 MSL(Mars Science Lab)로 2011년에 발사되었으며, 8개월 동안 3억5,200만 마일을 비행했다. 이 로버는 원자력 전지로 작동하도록 설계되었으며, 화성의 미생물체 존재여부를 확인하기 위해 아직까지도 화성 표면을 항해하고 있다. 원래 2년 간의 임무를 목표로 설계된 이 로버는 여전히 작동되고 있으며, 앞으로도 8년 이상 상당 기간 과제를 수행할 수 있을 것으로 예상되고 있다.
자일링스의 우주등급 제품은 로버에 탑재되는 MAHLI(영상장비), ChemCam(원격 센싱 기기), Electra-Lite(통신) 및 MALIN(프로세서)와 같은 주요 장비의 시스템을 지원한다. 로버의 로봇팔에 장착된 카메라인 MAHLI(Mars Hand Lens Imager)는 영상을 수집하고, 백엔드 이미지 프로세싱 박스로 구성된 MALIN 시스템은 모든 탑재된 카메라의 영상을 처리한다. 자일링스의 버텍스-II(XQR2V3000) 방사선 내성 FPGA는 이러한 시스템에서 이미지 파이프라인을 구현한다.
모든 인터페이스와 압축 및 타이밍 기능은 버텍스-II FPGA의 마이크로블레이즈(MicroBlaze™) 소프트 프로세서 코어의 로직 주변장치로 구현된다. 이를 통해 큐리오시티는 3,500만 마일 떨어진 외계의 멋진 풍경 사진을 전송할 수 있다. ChemCam(Chemistry and Camera Complex)은 자일링스의 방사선 내성 XQ2V1000 FPGA를 이용해 암석과 토양의 기본 조성물 및 고해상 이미지를 제공한다.
큐리오시티는 지구와 통신할 수 있는 X-대역 송신기 및 수신기와 같은 중요한 통신 시스템을 비롯해 지구로 데이터를 보내는 주요 경로로 기능하는 화성 궤도와 통신할 수 있는 UHF Electra-Lite 소프트웨어 정의 무선(SDR: Software-Defined Radio) 장비를 장착하고 있다. 자일링스의 XQR2V3000 방사선 내성 FPGA는 이러한 통신 장비에 적용되어 지구와 연결하는 중요한 기능을 제공한다.
미국 항공우주국(NASA)과 제트추진연구소(JPL)의 엔지니어 및 과학자들은 2021년 2월 18일, 화성의 에제로 분화구(Jezero Crater) 지표면에 탐사 로버를 성공적으로 착륙시키는 쾌거를 거두었다.
이 탐사 로버가 사상 처음으로 화성 사진을 촬영할 때 사용된 이미지 프로세싱 최적화를 위한 비전 프로세서와 착륙선의 로버 및 장비에는 자일링스(Xilinx®)의 FPGA가 탑재되어 임무를 수행하고 있다.
NASA의 퍼시비어런스(Perseverance) 로버는 화성의 생명체 거주 가능성과 존재여부를 확인하고, 미래의 유인탐사에 대비해 화성의 샘플을 가지고 지구로 귀환하는 임무를 수행하기 위해 2020년 7월에 발사되었으며, 이후 7개월 간의 비행 후 에제로 분화구에 성공적으로 착륙했다.
퍼시비어런스 로버는 화성 표면에 착륙하기 위해 내비게이션 및 자율주행을 지원하는 VCE(Vision Compute Element)에 FPGA 기반 하드웨어 가속기를 포함하고 있다. 자일링스의 방사선 경화(Radiation-Hardened) 버텍스-5QVs(Virtex®-5QVs, SIRF)는 영상 보정 및 필터링, 감지 및 매칭 등과 같은 특정 입체영상 및 시각적 작업을 가속화하는데 사용되는 컴퓨터 비전 가속기 카드(CVAC: Computer Vision Accelerator Card)에서 재프로그래밍이 가능한 비주얼 프로세서 역할을 수행한다.
내비게이션 및 자율주행 지원하는 하드웨어 가속기
또한 로버에 탑재된 장비 중 하나인 마스트캠-Z(Mastcam-Z) 다중 스펙트럼 입체 영상 기기는 MSL(Mars Science Lab) 아키텍처 기반의 디지털 박스에 방사선 내성 버텍스-II FPGA(XQR2V3000)를 사용하고 있으며, 유기물과 광물질을 탐사하는 셜록(SHERLOC: Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals) 분광계는 카메라 시스템에 XQR2V3000 FPGA를 통합하고 있다.
화성 탐사 임무에 자일링스 솔루션이 탑재된 것은 이번이 처음이 아니다. NASA의 오퍼튜니티(Opportunity) 로버는 화성에서 90일 동안 머무를 수 있도록 설계되었지만, 지구 시간으로 15년 동안 성공적으로 화성 표면을 탐사한 후 2019년 2월 13일 임무를 종료했다. 이번 NASA의 화성 탐사 프로그램은 지금까지 가장 성공적인 탐사 임무 중 하나로 기록되었다. 자일링스는 제트추진연구소 팀과 함께 이러한 역사적 임무에 참여하게 된 것을 자랑스럽게 생각한다.
화성 사진을 촬영할 때 사용된 이미지 프로세싱 최적화를 위한 비전 프로세서와 착륙선의 로버 및 장비에는 자일링스의 FPGA가 탑재되어 있다.
NASA 엔지니어들은 화성 탐사 로버의 정교한 발화 시퀀스를 밀리초 단위로 조정해야 하는 착륙선의 파이로(Pyro) 스위치 인터페이스 시스템의 핵심 요소로 FPGA를 사용했다. 또한 NASA는 화성 탐사 로버의 모터 제어 보드에 XQVR1000을 적용하여 바퀴와 스티어링, 팔, 카메라 및 다양한 장비의 모터를 감독하여 탐사 로버가 곳곳에 침전물이 쌓여 있는 화성의 지표면을 이동하면서 다양한 장애물을 극복할 수 있도록 했다.
화성으로 떠난 또 다른 탐사 로버는 ‘큐리오시티(Curiosity)’라고 불리는 MSL(Mars Science Lab)로 2011년에 발사되었으며, 8개월 동안 3억5,200만 마일을 비행했다. 이 로버는 원자력 전지로 작동하도록 설계되었으며, 화성의 미생물체 존재여부를 확인하기 위해 아직까지도 화성 표면을 항해하고 있다. 원래 2년 간의 임무를 목표로 설계된 이 로버는 여전히 작동되고 있으며, 앞으로도 8년 이상 상당 기간 과제를 수행할 수 있을 것으로 예상되고 있다.
자일링스의 우주등급 제품은 로버에 탑재되는 MAHLI(영상장비), ChemCam(원격 센싱 기기), Electra-Lite(통신) 및 MALIN(프로세서)와 같은 주요 장비의 시스템을 지원한다. 로버의 로봇팔에 장착된 카메라인 MAHLI(Mars Hand Lens Imager)는 영상을 수집하고, 백엔드 이미지 프로세싱 박스로 구성된 MALIN 시스템은 모든 탑재된 카메라의 영상을 처리한다. 자일링스의 버텍스-II(XQR2V3000) 방사선 내성 FPGA는 이러한 시스템에서 이미지 파이프라인을 구현한다.
모든 인터페이스와 압축 및 타이밍 기능은 버텍스-II FPGA의 마이크로블레이즈(MicroBlaze™) 소프트 프로세서 코어의 로직 주변장치로 구현된다. 이를 통해 큐리오시티는 3,500만 마일 떨어진 외계의 멋진 풍경 사진을 전송할 수 있다. ChemCam(Chemistry and Camera Complex)은 자일링스의 방사선 내성 XQ2V1000 FPGA를 이용해 암석과 토양의 기본 조성물 및 고해상 이미지를 제공한다.
큐리오시티는 지구와 통신할 수 있는 X-대역 송신기 및 수신기와 같은 중요한 통신 시스템을 비롯해 지구로 데이터를 보내는 주요 경로로 기능하는 화성 궤도와 통신할 수 있는 UHF Electra-Lite 소프트웨어 정의 무선(SDR: Software-Defined Radio) 장비를 장착하고 있다. 자일링스의 XQR2V3000 방사선 내성 FPGA는 이러한 통신 장비에 적용되어 지구와 연결하는 중요한 기능을 제공한다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>
100자평 쓰기