.jpg)
.jpg) 피터 페어허스트(Peter Fairhurst)
피터 페어허스트(Peter Fairhurst)
피터 페어허스트는 위치추적 제품 센터의 제품정책팀으로2015년에 유블럭스에 입사했으며 현재 유블럭스 고정밀 GNSS 제품 라인을 담당하고 있다. 유블럭스 입사 전에는 라이카 지오시스템 사(Leica Geosystems AG)의 제품 매니지먼트 그룹에서 고정밀 GNSS 측량 기술을 담당했었다. 피터 페어허스트는 수학과 컴퓨터과학의 학사 학위가 있으며 뉴캐슬 대학(Newcastle University)에서 위성 측지학 분야의 박사 학위를, 스트래스클라이드 대학(University of Strathclyde)에서MBA 학위를 수여 받았다.
GNSS 기술이 고정밀 측위 솔루션으로 성장하기 위한 조건
이 글에서는 GNSS 기능의 현재 수준을 평가하고, 새로운 전기를 맞는 GNSS 기술의 보급을 위해 선결되어야 할 조건들에 대해서 논의한다.
GNSS(Global navigation satellite system: 위성항법 시스템) 기술은 차량용 내비게이션 시스템부터 웨어러블 기기에 이르는 모든 것에 적용되고 있어, 우리의 일상 생활에서 쉽게 찾아볼 수 있게 되었다. 그러나 GNSS 기술이 자동차 및 무인 차량과 같은 새로운 응용분야의 까다로운 요건을 충족시킬 수 있는 수준의 구현성과 신뢰성을 담보하기 위해서는 아직 가야 할 길이 멀다.
이 글은 GNSS 기술의 현재 수준을 정확도, 크기, 전력 및 비용적 관점에서 살펴보고, GNSS 기술이 특정 애플리케이션에 적합한 고정밀 측위 솔루션으로 성장하고, GNSS가 개척할 새로운 시대를 열기 위해 선결되어야 하는 조건들에 대해 윤곽을 그려보려 한다.
개요
현재 보통의 GNSS 기술은 사람, 제품 및 항공기, 선박 및 육상 차량을 포함하여 사실상 모든 것들을 추적하고, 지도에 표시하며, 그 위치를 탐지하는 목적으로 사용되고 있다. GNSS 기술은 웨어러블 기기에서 산업 및 농업 분야에 이르기까지 다양한 전문 분야에서 사용되는 각종 장비와 공정에도 적용된다. 뿐만 아니라 GNSS 기술은 위성 기반으로 일반 대중이 이용할 수 있기 때문에 무제한의 사용자를 수용할 수 있다는 장점이 있다.
지난 수년간, 유블럭스와 같은 반도체 회사들이 GNSS 솔루션의 소형화에 성공함에 따라 우리는 차량에서 더나은 내비게이션을 사용하고 스마트폰으로 길을 찾을 수 있으며, 웨어러블 장치를 이용하여 산행 중에도 길을 잃을 염려가 없어졌다. 위성 시스템들은 현재 이용 가능하고 확장 중이지만, GNSS가 새로운 차량 애플리케이션(자율 주행 등) 및 무인 애플리케이션(드론 수송 등)과 같이 더 높은 수준의 정확도를 요구하는 애플리케이션에서 그 잠재력을 발휘하기 위해서는 정확도, 확장성 및 적정 비용과 같은 기술적인 장벽이 먼저 해소되어야 한다.
정확도 개선의 과제
현재 GNSS 솔루션은 모두 상용 항법 위성을 사용한다. 전세계 GNSS 네트워크는 현재 미국의 GPS, 러시아의 글로나스(GLONASS), 중국의 베이더우(BeiDou) 그리고 유럽연합의 갈릴레오(Galileo, 2020년 완전 가동 예정)이 있으며 이와 더불어 중국과 일본(QZSS)은 자체적으로 지역 항법 및 SBAS위성을 개발 중이다. 2020년까지 이 모든 위성들이 완전하게 구축될 예정이며, 그 시점에는지구상 거의 모든 지점에서 항시 30개 이상의 위성이 보일 것이다.
지상의 경우, 일반적인 GNSS 칩은 소형화되고 그 비용 또한 합리적인 수준으로 떨어졌다. 그러나 그 정밀도는 크게 발전하지 못했다. 차량용 내비게이션 등과 같은 일반적인 정확도를 갖는 GNSS 솔루션은 도시 협곡, 지붕이 존재하는 공간 및 기타 위성 신호 품질이 취약한 지역을 제외하고는 그 목적에 따라 대단히 효과적이며, 언제나 미터(m) 수준의 정확도를 제공하는 수준으로 발전했다. GNSS 기반의 차량용 내비게이션 시스템은 이와 유사한 이점과 한계를 갖고 있다.
그러나 이제는 끊김이 없으면서도 높은 수준의 정확도를 가진 위치 정보를 요구하는 새로운 전례 없던 개발을 고려해야 한다. 일례로, 자동차 엔지니어들은 현재 증강 현실을 통해 차량의 전면 유리에 차량 속도와 주행 경로를 투사할 수 있도록 헤드업 디스플레이(HUD) 기술을 내장하는 개발을 진행 중이다. 차량용 HUD 시스템은 GNSS 칩과 카메라 및 모바일 앱을 통합한 기술로, 차선을 변경하거나 진출로를 결정하는 시점을 실시간 시각 정보를 통해 안내한다.
그러나 차량이 교각이나 터널을 통과하는 중일 때는 어떻게 이러한 GNSS 기반의 내비게이션 솔루션이 작동할 수 있을까? 이러한 경우, 운전자는 차선이나 진출입로에 관한 정보를 어떻게 알 수 있을까? 물론 추측 항법 기술(즉, 이전 위치를 기반으로 센서와 속도를 이용해서 현재 위치를 추정하는 기법)도 도움이 될 수 있지만, 현재 기술 수준으로 볼 때 터널 속이나 고층 건물군 내에 위치할 때, 일반 GNSS 솔루션으로 고속도로 차선을 구별하는 것은 여전히 어려운 문제다. 현존하는 기술은 열악한 위성 수신 조건을 가진 지역에서 상기한 높은 수준의 위치 정확도를 제공하지 못한다.
이와 유사하게 무인항공기(UAV) 시장의 급속한 성장에 따라, 무인항공기 조종사가 데이터를 신속하고 안전하게 수집할 수 있도록 정확하고 연속적인 내비게이션 데이터의 필요성이 증가하고 있다. 현재 사용 중인 일반 GNSS 칩이 탑재된 무인항공기들은 양질의 데이터와 안전한 운전을 위해 조종사의 안정적인 통제를 요구한다. 더 높은 정밀도의 GNSS 기술은 자동화된 데이터 수집과 추적기술(geo-tagging, 지오 태깅)의 개선을 통해 더욱 신속하게 데이터를 수집 및 처리하여 그 산출 결과의 전달 소요시간을 절감한다.
운전자에게 잠재적인 문제를 인식시키고 차선을 올바르게 유지하도록 하며, 충돌을 방지하고 필요에 따라 운전자 대신 차량을 직접 통제할 수 있는 첨단 운전자 지원 시스템(ADAS) 역시 언제 어디서든 고정밀의 위치 정확도가 필요하다. 전통적인 지도 체계 또는 AVL 시스템은 약 15미터 정도의 도로(street) 수준의 측위 정확도를 토대로 한다. 차선 수준의 내비게이션 및 이와 연관된 알고리즘의 경우, 데시미터(10분의 1 미터) 급의 측위 정확도를 요구한다.
현재 상용화된 일반GNSS 칩은 소형이며 합리적인 수준의 가격과 미터 수준의 정확도를 제공한다. 그러나 이러한 칩은 앞서 설명한 애플리케이션의 요건 및 자동차나 로봇 애플리케이션의 다른 새로운 요건을 충족하는 측위 정확성을 기반으로 설계된 것이 아니다.
고정밀(즉, 센티미터급) GNSS 기술은 이용이 가능하지만, 아직까지는 극히 제한된 분야에서 사용되고 있다. 센티미터급 정밀도를 가진 측위 시스템은 측량 그리고 최근에 이르러서는 기기 제어 및 농업 부문에서 많은 편익을 제공하게 되었다.
고정밀 GNSS 솔루션은 장치 당 미화 1000 달러 대에 보급되고 있으며, 장치 당 비용이 그보다 현저히 낮은 표준 정밀도의 GNSS 솔루션과 비교할 때 대조적이다.
GNSS 칩 제조사들의 과제는 합리적 비용의 고성능 고정밀 GNSS 수신기를 개발하는 것이다. 아직 가야 할 길이 멀지만, 이러한 고정밀 측위 기술의 새로운 시대를 열기 위한 기반 작업은 이미 진행 중이다.
.jpg)
고정밀 측위 기법
고정밀 GNSS 측위 기술은 최적화된 신호 주파수의 조합, 이용 가능한 위성 통신 인프라 및 보정 데이터 서비스를 통해 구현되고 있다.
최적화된 신호 주파수
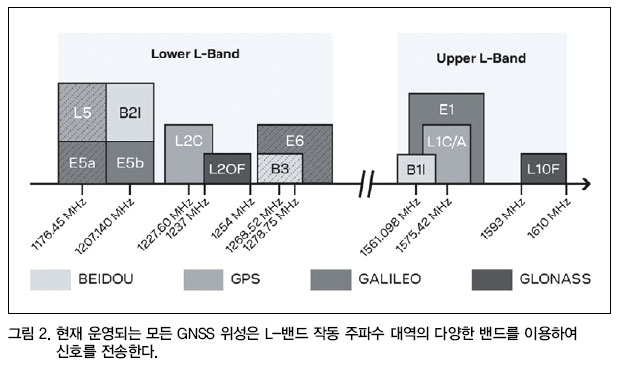
현재 운영 중인 모든 GNSS 위성은 무선 주파수(RF) 신호를 L-밴드 작동 주파수(C-밴드및 S-밴드 등의 고주파수와 비교할 때 대역폭, 구현 용이성 및 경제성 등에서 상대적 이점이 있음)로 전송한다. RF 신호는, 하나의 PRN 코드로 변조되는 하나의 RF 반송파로 구성된다. 일반 GNSS의 경우, 수신기는 PRN코드를 위성과 매칭하여, 해당 위성에서 전송된 신호의 전파 전달 시간을 결정한다. 이럴 경우 최대 정확도는 3~6미터 급의 오차 수준이다(예: 대기 불안에 따른 오류 등으로 인하여).
복수의 위성 네트워크(GLONAA, Galileo, BeiDou 등)로부터 서로 다른 주파수 밴드(예: L1, L2, L5)로 신호를 수신하여, 높은 정확도를 가진 멀티밴드 GNSS 수신기도 등장한 바 있다. 이중 주파수 측정(예: L1, L2)은 고정밀 애플리케이션에서 이온층의 영향을 제거하고, 모호정수 결정(ambiguity resolution)을 개선할 수 있다.
이미 L1 CA-코드 및 새로 개발된 L2-C-코드를 기반으로 한 고급형 이중 주파수 민간용 는 개발되었다. 정부의 GNSS 위성 운영자들은 그 네트워크의 항법 신호를 현대화하기 위해 지속적인 노력을 하고 있다. 미국의 경우, 중앙 정부는 L2C, L5 및 L1C라는 세 개의 새로운 신호를 민간용으로 공개하였다.
미국의 National Coordination Office for Space-Based Positioning, Navigation and Timing(위성 기반 측위, 항법 및 시각 정보를 위한 국가 조정실)에 따르면, 이중 주파수 수신기에서 L2C신호를 L1 C/A와 결합할 경우 이온층 오차를 보정할 수 있다. 추가적으로, L2C 신호는 더 빠른 신호 획득, 향상된 신뢰성 그리고 더 넓은 운영 범위를 제공한다. 요약하자면, 다중 주파수 밴드의 동시 사용은 측위 수렴 시간을 감소시키며, 복수의 위성은 가용성과 신뢰성을 향상시킨다.
그러나 멀티밴드 GNSS 칩의 등장 자체가 양산 시장의 가격 경쟁력, 고정밀 및 확장성 등의 문제를 해결할 수 있는 것은 아니다. 멀티 밴드 GNSS는 다양한 사용 조건(예: 스마트폰)에서 개선된 사용자 경험을 제공할 수 있지만, 아직 관련 솔루션들은 자동차 및 산업 애플리케이션 부문의 엄격한 정확도 요건을 충족할 만큼의 안정성과 정확도를 제공하지 못한다. 최소한 고정밀 GNSS 기법을 통한 보완이 없다면 말이다.
통신 인프라
GNSS의 측위 정확도를 높이는 가장 보편적인 방법 중 하나는 차분 GNSS(Differential GNSS) 기법을 사용하는 것이다. 이 기법을 사용할 경우, 수신기는 PRN 코드대신 반송파의 파장을 측정하게 되며, 실시간 보정 정보를 제공하는 기준국에 의존한다. 반송파 위상 수신기(carrier phase receiver)는 반송파의 모호 정수를 계산하여 이동하는 장치에 센티미터급 정확도를 제공한다.
지난 수년 간, RTCM 표준을 토대로 관측공간보정정보(OSR, Observation State Representation/예; VRS, 가상기준국) 네트워크가 구축된 바 있다. 일례로, 스위스 지형청(Federal Office of Topography 또는 swisstopo)이 구축한 AGNES (Swiss Automated GNSS Network for Switzerland)은 멀티 밴드 GNSS 수신기가 설치된 30개 이상의 기지국을 운영하고 있으며, 41,290km2에 달하는 스위스 전 영토를 커버하고 있다.
AGNES는 19개의 해외 기지국을 추가로 포함하며, 49개 사이트에서 처리된 데이터를 통합 운영하여 스위스 전역을 관장하는 VRS 솔루션을 구현하였다. 이에 따라, 스위스 전국 어느 위치에서나 평균 30km 이내에 최소 하나의 AGNES 기준국이 위치하게 되어 사용자들은 전국 어디에서든 센티미터급 정확도를 얻을 수 있다.
그러나, 현재 고정밀 측위를 위해 맞춤화된 보정 서비스들은 사용이 가능하고 정확한 반면, 양산 시장에서 상용화 할 때 필요한 확장성은 제공하지 못하고 있다.
.jpg)
연결성 및 보정
전통적인 보정 정보 서비스들은 셀룰러 네트워크 기반의 양방향 통신에 의존한다. 보정 정보 서비스 제공업체들은 GNSS 기준국 네트워크 전체에 걸쳐 지속적으로 GNSS 오차를 모니터링하고 있다. 필요에 따라, 고객 소유의 수신기는 자기 위치 정보를 보정 서비스 제공업체 측에 전달하고 서비스 제공업체는 기준국 네트워크로부터 전달된 GNSS 관측 데이터를 이용하여 해당 위치에 적합한 보정정보를 생성하여 해당 가입자에게 재 전송한다.
그렇다면, 수천 또는 잠재적으로 수백만의 장치들이 보정 정보 서비스를 위해 셀룰러 데이터의 대역폭을 점유하게 될 경우, 보정 서비스 업체들이 해결해야 할 과제는 무엇일지 생각해 보자. 과거 보정 정보서비스들은 각 사용자를 위한 고유 보정 서비스를 생성한다. 양산용 애플리케이션에 있어 데이터 보정 서비스와 단일 운영자 간의 양방향 링크는 실현이 불가능하다.
높은 비용을 논외로 하더라도, 보정 서비스는 종종 단일 국가 또는 심지어 주(state) 단위로 운영되는 경우가 꽤 있는데, 이는 자율주행 차량이나 드론 운송과 같은 애플리케이션에 있어 장애요인이 된다. 국가 또는 주 경계를 넘어 커넥티드 차량을 운전하거나, UAV 기반의 항공 측량을 해외에서 실시할 경우, 그 새로운 위치에서도 고정밀 GNSS 서비스를 사용할 수 있게 하기 위해서는 로밍 계약이나 추가 비용이 발생할 수밖에 없다.
구독자 기반의 보정 서비스 모델을 양산 시장으로 확장하는 일 또한 쉽지 않다. 어떤 사용자가 연 단위 구독을 위해 돈을 지불하겠는가? 차라리 해당 산업이 보정 서비스를 번들로 판매하여, 다수의 차량이나 애플리케이션에 대한 비용의 규모 효과를 누리는 편이 더 낫지 않을까?
.jpg)
양산용 애플리케이션을 위한 고정밀 측위 기술
고정밀 GNSS가 확장성과 적정 가격을 확보하기 위한 가장 중요한 요소는 다음 세대 GNSS 하드웨어와 보정정보 서비스가 될 것이다. 특히, 오늘날 구독자 기반의 보정정보 서비스 모델의 장벽을 극복하는 것이 관건이다. 상태공간정보(SSR, State Space Representation) 보정 기술은 단방향 전송 방식에 초점을 맞춘 GNSS 보정 서비스의 새로운 예라고 할 수 있다.
SSR은 예전부터 고비용의 기술이었다. 그러나 SSR 애플리케이션 수요가 증가함에 따라, 규모의 경제가 작용하여, 미화 약 1000달러에 형성되었던 종래의 가격은 현재 크게 감소하여, UAV에서 무인 차량에 이르는 상업적 애플리케이션에 대량 채택이 가능한 수준이 되었다.
PPP(precise point positioning) 또는 PPP-RTK와 같은 SSR 기법들은 센티미터급 측위 정확도의 구현을 위해 사용될 수 있다. SSR 기반의 기법들의 기술적 원리는 측정 오차를 모델링 및 보정 결과(전지구 또는 지역 단위 GNSS 기준국 네트워크로부터의 정밀 위성 궤도, 대기 및 시각 보정 등)를 사용하여 줄이거나 또는 제거할 수 있다는 것이다.
양방향 통신을 각각의 개별 운영자가 운영하도록 하는 대신, 모델링 된 GNSS 오류 데이터를 GNSS 수신기에 광역 단위로 송출하는 방법은 양산 시장용 애플리케이션을 위한 초석이 될 것이다.
일본은 전국을 포괄하는 커버리지를 구현(CLAS 서비스가 QZSS L6 신호를 통해 송출)한 반면, 아직 기존의 고정밀 서비스를 대륙 또는 전지구 단위의 커버리지로 확장하려는 시도는 이루어진 바가 없다. 이와 관련하여, 유럽 기반의 삽코다(Sapcorda, 유럽 및 미국에서의 사용을 위한 차세대 GNSS 보정 서비스) 등과 같은 일부 공개 포맷 솔루션이 현재 개발 중에 있다. 보정 데이터를 공개 포맷으로 인터넷 상에서 이용 가능하게 만들 경우, 하드웨어 제조사들은 자체적인 고정밀 GNSS 솔루션을 개발할 수 있을 것이며, 국가 단위의 모바일 서비스의 한계를 극복할 수 있을 것이다.
자율 주행처럼 안전이 중요하게 고려되어야 하는 애플리케이션이나 정확도가 최우선의 가치가 되는 경우(예: 드론 기반 측량), 그러한 서비스의 견고성은 타협이 불가능한 선결조건이 된다. 셀룰러 망이 포화될 경우에도 송출의 혼잡이 발생하지 않도록 하기 위해, GNSS 개발자 및 유블럭스와 같은 제조사들은 3GPP 기구와 면밀히 협조하여, 보다 신뢰할 수 있는 서비스를 창출하는 전달 메커니즘을 구현하는 표준을 개발하고 있으며, 이를 통해 관련 서비스 차원의 합의를 도출하고자 노력 중이다
요약
고정밀 GNSS 솔루션은 크기, 전력 소비 및 비용과 관련한 제약에도 불구하고, 현재 상용 시장에 보급되고 있다.
고정밀 GNSS 기술은 현재 차량 부문의 경우, 이동식 매핑 애플리케이션 및 차량 테스트 트랙 등을 위해 사용되며 UAV 분야의 경우, 중간 지점 탐색, 궤도 제어 및 지오 태깅에, 중장비 부문의 경우, 농업 및 건설 분야의 일부 애플리케이션에 사용되고 있다. 특정 상업용 무인 차량 애플리케이션은 고정밀 GNSS(예: 로봇 운송 차량)를 통해서만 구현이 가능하며 물론, 합리적 비용과 확장성은 자율 주행 차량 부문의 선결 조건이 되고 있다.
그러나 현재 GNSS 솔루션은 확장하기가 어렵다. 이는 수년 내, 많은 신규 차량과 관련한 표준이 될 잠재력을 가진 해당 기술에 있어 치명적인 약점으로 작용하고 있다. 진정한 의미에서의 양산용 애플리케이션을 위해, 고정밀 GNSS 서비스 제공업자들은 방대한 커버리지를 토대로 공개 서비스를 제공해야 하고 국가 및 주 경계, 구독 및 상충되는 규제의 문제를 적절히 관리할 수 있어야 한다. 이러한 도전과제들은 이미 다양한 B2B 모델 개발을 통해 다루어지고 있으며, 보정 서비스업자들은 서비스 비용을 최종적으로 사용하는 차량의 초기 비용으로 처리하기 위해 노력 중이다.
머지 않아, 무인 시스템 설계에 있어 비용은 고정밀 측위 기술의 채택을 가로막지 못하게 될 것이며 이에 따라 로봇, 차량 및 중장비 부문과 관련한 해당 기술의 개발 및 채택도 증가할 것이다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>