극자외선 EUV 기술이 지난 수년간 발전하면서 새로운 효과에 대한 모델도 발전 및 향상됐다. 이 글은 새로운 왜곡 중 하나인 EUV 섀도우잉 효과가 광 근접효과 보정(OPC)에 미치는 영향을 다루면서 이 섀도우잉 효과를 관리하기 위한 모델 기반의 솔루션을 살펴본다.
EUV 리소그래피를 양산에 사용할 수 있는 시점을 두고 논쟁이 분분하지만, OPC를 포함한 EUV 시스템의 모든 부분을 실행하기 위해 연구개발이 현재 적극적으로 진행되고 있다. 물론 서브-파장(sub-wavelength) 리소그래피에서 나타나는 패턴 왜곡을 피할 길은 없다. 또한 EUV는 이전과 다른 패턴 왜곡 효과를 새롭게 일으킨다.
3 D 마스크 시뮬레이션의 효과
EUV 리소그래피를 13.5 nm 파장으로 축소하기 위해서는 전용의 광학장치와 소재, 특히 반사형 레티클이 요구된다. EUV 광학 시스템은 전적으로 반사형 부품들(거울)로만 제작되며 이는 13.5 nm의 EUV 파장이 모든 것에 흡수되기 때문이다. EUV에 요구되는 반사형 마스크 스택과 비등축(off-axis) 마스크 조명은 마스크 섀도우잉과 같은 새로운 이미징 효과들을 유도해 컴퓨테이셔널 리소그래피를 통해 신중하게 캡처해야 한다.
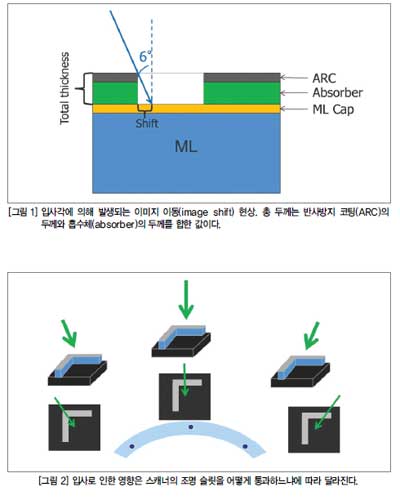
웨이퍼 수준에서 마스크 섀도우잉 효과는 조명 스캐너 슬릿을 통해 CD 변이를 발생하며 왜곡 정도는 전사되어야 하는 피처(feature)의 방향과 위치에 좌우된다. 현재의 입사각은 법선으로부터 6 °로써 그 방위각이 변화한다. 이 각도는 스캐너의 조명 슬릿을 따라 67 °에서 123 °까지 변화한다. 이러한 비등축 조명이 섀도우잉 효과를 발생하는 이유는 그림 1에서 보듯이 마스크의 두께가 있기 때문이다.
이론적으로 이 경우의 이미지 이동(변위)은 다음과 같이 총 두께와 입사각이라는 면에서 기술할 수 있다: 변위 = 총 두께 x 탄젠트(6 °). 이를 올바르게 시뮬레이트하기 위해서는 3 D 마스크 시뮬레이션을 이용해야 한다. 더 어려운 점은 스캐너의 조명 슬릿을 통해 이 문제를 들여다보려 하는 경우이다.
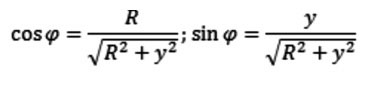
우리는 스캐너 슬릿 내의 위치를 두 가지 파라미터 조합으로 기술한다. 하나는 반경으로써 광학축과 마스크 평면의 교차점이고, 다른 하나는 방위각으로써 66 ° ~ 114 ° 범위의 값을 가진다. 여기서 φ = 90 °는 슬릿의 중심부에 해당한다. 슬릿의 중심부에 있는 수직 방향의 선들에는 마스크 섀도우잉 효과가 미치지 않는다. 입사면에 수직인 수평 방향의 선들은 최대한의 마스크 섀도우잉 효과를 받게 된다. 그림 2는 방위각이 슬릿을 통과하며 변화함에 따라 마스크에 미치는 영향이 달라짐을 보여주고 있다.
시뮬레이션 데이터와 비교
EUV 이미징에 있어 토폴로지를 인식한 마스크 모델링을 평가하기 위해 대량의 웨이퍼 CD 데이터 세트를 수집하여 이를 시뮬레이션 데이터와 비교했다. 그림 3a는 서로 다른 패턴에 대한 섀도우잉 효과를 고려하지 않은 시뮬레이션 데이터와 웨이퍼 데이터 간에 발생하는 오류를 보여준다. 시뮬레이션은 슬릿 중심부의 3 D 마스크 계산 값만을 사용하므로 다른 슬릿 위치에서의 섀도우잉 효과에 대한 시뮬레이션이 존재하지 않는다. 그 결과 슬릿을 통과하며 포물선이 되는 추세를 보이는데, 이는 방위각의 변화에 인한 것이다.
우리는 입사각 90 °를 3 D 마스크 계산 시의 방위각으로 이용했다. 이는 슬릿 중심부의 정확한 방위각이다. 따라서 시뮬레이션 데이터는 중심부에서 웨이퍼 CD 데이터와 가장 잘 일치한다. 하지만 방위각이 90 °로부터 변화하면 3 D 마스크 계산은 점점 더 정확성이 떨어지게 된다. 오류는 가장자리로 갈수록 커진다.
오류의 계산은 측정값에서 시뮬레이션값을 빼주면 되므로, 그림 3에서 볼 수 있는 음수는 시뮬레이션 값이 웨이퍼 CD의 값보다 컸음을 뜻한다. 그림 3(a)의 데이터는 슬릿 전면을 고려한 섀도우잉 효과가 아니라 중심부의 효과만을 캡처하고 있다. 정확한 시뮬레이션 결과를 얻기 위해서는 슬릿 전면에 대한 섀도우잉 효과를 우리의 모델에 추가하지 않으면 안 된다. 우리는 룰 기반의 바이어스 테이블을 이용하여 이를 포함했다. 룰 기반의 바이어스 테이블은 다음 공식에 입사각/방위각과 마스크 두께를 이용함으로써 얻을 수 있었다:

여기서 h는 마스크의 총 두께이며, θ는 입사각이고 Φ는 방위각이다. 스캐너 슬릿 방향에서의 방위각과 위치 간의 관계는 다음과 같다:
여기서 R은 조명 슬릿의 반경이며 y는 위치이다. 이 등식은 위치와 바이어스를 한데 연결시켜, 이상적인 이론상의 섀도우잉 효과에 바이어스 테이블을 생성하기 위한 지침 역할을 한다.
때로는 섀도우잉 효과만이 슬릿을 통한 현상의 변화로서 고려할 유일한 요소가 아닐 때도 있다. 예를 들어 수차(收差)와 조명계도 변화를 줄 수 있는 요소로 고려되어야 할 것이다. 여러 슬릿 위치에 섀도우잉 효과를 보정하지 않은 일련의 실험 데이터가 있을 때, 웨이퍼 데이터와 목표 값 간의 차이를 측정할 수 있다.
.jpg)
이 차이로부터 슬릿 전면의 변화에 대한 바이어스 테이블을 얻을 수 있는데, 여기는 섀도우잉 바이어스 변화는 물론, 수차와 조명계에 기인한 변화도 포함한다. 그림 3b의 데이터에서 바이어스 테이블은 이론상의 공식이 아니라 실험 데이터로부터 직접 얻은 것으로써, 슬릿 전면에 따른 모든 변화를 포함하고 있다. 이 바이어스 테이블을 시뮬레이션에 적용함에 따라 CD 오류를 재계산하게 된다.
그림 3b는 각 슬릿 위치에서의 시뮬레이션과 측정된 CD 간의 평균 오류가 그림 3a의 결과에 비해 매우 줄어들었음을 알 수 있다. 하지만 그림 3b의 데이터 지점에서 계산된 RMS 오류는 개선되지 않고 있다. 이는 관찰되는 섀도우잉 효과가 패턴에 따라 달라지기 때문이다. 룰 기반의 바이어스 테이블은 슬릿 전면에 의한 변화를 고려하지만, 서로 다른 모든 패턴의 변화를 동일하게 간주한다. 그러나 슬릿 통과에 의한 변화는 패턴에 좌우된다.
더 정확한 시뮬레이션 결과를 얻기 위해서는 모델 기반의 방법을 이용해 섀도우잉 효과를 예측하고 바로잡아야 한다. 한 예로서, 그림 3a와 3b에는 7개의 슬릿 위치가 있다. 이 모든 위치에 3 D 마스크 모델링을 사용한다면 섀도우잉 효과를 정확하게 계산할 수 있을 것이다. 룰 기반의 바이어스 테이블 대신에 모델 기반의 방법을 사용할 경우 발생하는 CD 오류 결과는 그림 3c에서 보는 바와 같다.

서로 다른 슬릿 위치들에서 그림 3b와 그림 3c의 데이터로부터 계산된 RMS 오류를 비교하면 모델 기반의 방법을 이용해 슬릿 전면의 섀도우잉 효과를 알아내는 쪽이 상당한 이점이 있음을 알 수 있다.
이 실험은 섀도우잉 효과를 최고의 정확도로 시뮬레이트하기 위한 모델 기반의 방법이 필요할 수 있음을 보여준다. 따라서 섀도우잉 효과에 대한 보정이 필요하다면 연산 시간을 단축하기 위해 룰 기반의 바이어스 테이블을 사용하든가 혹은 정확성을 높이기 위해 모델 기반의 방법을 사용할 수 있다.
SRAF의 사용 시점
EUV 리소그래피의 비대칭적인 조명도 다른 문제를 일으키는데, SRAF(sub-resolution assist feature) 패턴의 비대칭성이 바로 그것이다. 제일 먼저 던질 질문은 ‘EUV에서 SRAF를 사용해야 하는 시점이 언제인가’하는 것이다. KrF(krypton fluoride)와 ArF(Argon fluoride)에서의 비슷한 상황을 경험한 바와 같이 SRAF가 처음 사용된 것은 KrF의 130 nm 기술 노드였으며, 이는 k1 팩터 0.39 수준에서였다. 또한 ArF에서 SRAF를 사용하기 시작한 것은 90 nm 노드의 k1 팩터 0.35 수준에서부터였다.
.jpg)
7 nm 공정 노드에서 하프 피치는 16 nm이고 k1 팩터는 0.41이다. 이 k1 수치는 우리가 SRAF를 도입했을 때의 KrF 및 ArF의 수치에 매우 근접했기 때문에 SRAF를 EUV 리소그래피에 사용하는 것을 고려할 수 있다. SRAF를 EUV에 사용하기 위해 고려되어야 할 다음 질문은 ‘스캐터링 바(scattering bars)를 어떻게 배치할 것인가’이다. 우리는 7 nm 노드 웨이퍼의 Isolated Contact Pattern을 이용하여 간단한 예제를 작성했다. 대칭적인 SRAF를 적용함으로써 그림 4(a)의 공정 여유도(process window)를 얻을 수 있으며 초점심도(DOF)는 98 nm이다.
또한 SRAF를 바꿔가면서 최상의 초점심도 설정치를 모색했다. 이 경우에서 우리가 찾아낸 최상의 초점 심도는 그림 4(b)에서 보듯이 167 nm였으며, 이는 일련의 비대칭 SRAF를 이용해 달성됐다. 두 공정 여유도를 비교함으로써 대칭형 SRAF 배치의 공정 여유도가 대칭이 아니며, 이 때문에 초점심도가 줄어든다는 것을 알았다. 이러한 결과로부터 최상의 공정 여유도를 얻기 위해서는 EUV의 non-telecentric 이미징 시스템으로 비대칭적인 SRAF 배치가 필요할 수 있다고 결론을 내렸다.
결론
EUV에 특정한 비등축 마스크 조명은 EUV OPC에서 섀도우잉 효과라는 특수한 문제를 일으킨다. 이 효과는 룰 기반의 바이어스 테이블을 이용해 적절하게 보정할 수 있고 이 방법은 모델 기반의 시뮬레이션보다 빠른 런타임을 제공한다. 하지만 같은 위치에 있는 모든 패턴이 동일한 바이어스 값이 있어야 하는 것은 아니므로 모델 기반(3 D 마스크 시뮬레이션)의 보정이 섀도우잉 효과를 더 잘 예측할 수 있다. 따라서 섀도우잉 효과에서 기인한 오류를 더 정확하게 수정해 줄 수 있다.
마지막으로 초점심도로 판단하건대 최상의 SRAF 배치 역시 비대칭적임을 알았는데, 이는 EUV system이 가지는 입사각의 비대칭적 성격 때문이다. 섀도우 모델링 결과들은 양산 준비단계의 ASML NXE:3100 EUV 리소그래피 툴에서 검증됐다. EUV가 양산 용도에 더욱 가까이 다가감에 따라, EUV 특정의 패터닝 효과를 보정하기 위한 OPC 툴의 개발, 통합 및 테스트가 순조롭게 진행되고 있다.
저자소개
판 지앙(Fan Jiang)은 멘토 그래픽스 EUV OPC 부문의 생산 엔지니어이다. 그는 반도체 산업의 OPC 및 광 리소그래피 연구개발 분야에서 8년간 일해 온 EUV 분야의 전문가로서 위스콘신 대학 매디슨 캠퍼스에서 물리학 박사학위를 받았다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>