입력 전력 및 전류를 측정하는 일반적인 방식은 전용 전력 미터링 칩과 추가 감지 회로를 이용하는 것이다. 전력 미터링 칩은 그런대로 괜찮은 결과를 내놓긴 하지만, 비용을 증가시키고 설계상 수고가 필요하다. 본고에서는 입력 전력 및 RMS 전류를 측정할 수 있는 저렴하고 정확한 솔루션을 제시한다.
서론
실제 입력 전력과 입력 RMS 전류의 측정 등 오프라인 전원 공급 장치의 실시간 에너지 소비 측정이 그 어느 때보다 중요해지고 있다. 이 측정을 이용하면 전력 전달을 조절하고 에너지 사용량을 최적화할 수 있다. 특히 많은 서버를 포함한 데이터 센터는 서버 레벨에서의 보조 계량으로 저가 데이터 서비스를 구현하여 저전력 동작 과정에서 지능적으로 전력 처리를 관리하는 데 관심을 두고 있다.
측정 셋업
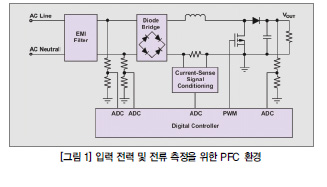
그림 1은 절연 전력을 위해 디지털 컨트롤러로 제어하는 기존의 PFC 셋업을 보여주고 있다. 입력 라인과 중성 전압은 둘 다 감쇠 네트워크를 통해 감지된 후 두 개의 별개 ADC(analog-to-digital-converter) 입력을 통해 샘플링된다. 전류 신호는 전류 션트로 감지 후, 신호 조절 회로로 증폭 및 여과된다.
다음으로 전류-루프 제어를 위해 ADC로 연결된다. 입력 전압 및 전류 측정은 이미 가능해 마찬가지로 입력 전압 및 RMS 전류를 측정하는 데 이용할 수 있다. 이러한 측정은 기존의 PFC 환경과 똑같이 사용된다. 또한 기존의 전용 전력 미터링 칩과 추가 감시 회로는 제거된다.
전류 측정과 캘리브레이션
전류 감지 신호 컨디셔닝 회로(그림 1)는 연산 증폭기와 로우-패스(low-pass) 필터로 구성됐으며 감지된 작은 신호를 증폭시켜 고주파수 잡음을 없앤다. 이 신호는 ADC를 통해 측정된 후 ADC 카운트로 보고된다. 실제 전류 값을 얻으려면 ADC 카운트를 다시 암페어 전류로 변환시켜야 한다. ADC 카운트와 암페어의 관계는 도식에서 추론할 수 있다. 하지만 그 부품 허용오차가 측정 정확도를 해칠 수 있다. 따라서 캘리브레이션이 필요하다.
그림 1의 회로를 고려했을 때, 어느 지점에서든 입력 션트까지의 입력 전류는 밀리암페어로 다음과 같다:
i=KiCi-mi (1)
여기에서 ki는 전류 감지 게인이나 슬로프이고 Ci는 ADC 변환 출력(카운트)이다. 또한 mi는 전류 감지 오프셋이다. DC(direct-current) 입력의 경우, 평균값은 그 순간의 값과 같다. 따라서 방정식 1은 여전히 유효하다:
IDC=KiCi-mi (2)
방정식 2는 DC 소스를 이용해 전류측정 회로를 캘리브레이션할 수 있음을 보여주고 있다. 일정 DC 전력이 PFC 입력에 적용되면 25% 부하 후, 75% 부하에서 측정이 이뤄진다. 비교를 위해 미터를 이용한 두 부하 조건에서 실제 입력 전류의 벤치마크 측정했다. 또한 ADC 변환의 카운트 출력도 두 부하 조건에서 읽어 들여 디지털 컨트롤러의 정확도를 판단했다. 컨트롤러는 다음과 같은 수식 관계를 이용하고 있다:
25% 부하의 경우,
IDC1=KiCi1-mi (3)
75% 부하의 경우,
IDC2=KiCi2-mi (4)
전류 슬로프와 오프셋은 방정식 3과 4에서 계산할 수 있다:
Ki=(IDC2-IDC1) / (Ci2-Ci1) (5)
mi=(Ci1IDC2-Ci2IDC1) / (Ci2-Ci1) (6)
계산된 ki와 mi는 소수로 1보다 작을 수 있는데, PFC 애플리케이션에서 디지털 컨트롤러의 대부분은 수식에 고정소수점을 사용한다. 어림수 오류를 줄이고 계산 정확도를 충분히 유지하기 위해 작은 소수 값에 2N을 곱한 후 근사 정수로 반올림한다. 예를 들어 PFC 회로에서 전류 감지 게인과 오프셋이 ki=1.59, mi=229.04로 계산된 경우, ki에 28을 곱해 407로 반올림한다. 그리고 mi에 20을 곱하면 전류 슬로프 및 오프셋은 각각 다음과 같아진다:
ki = iin_slope>>iin_slope_shift
그리고
mi = iin_offset>>iin_offset_shift,
여기에서 iin_slope = 407, iin_slope_shift = 8, iin_offset = 229, iin_offset_shift = 0이다.
입력 전력 및 RMS 전류를 계산할 때 ki와 mi가 승수인 경우, 이들을 직접 사용하는 대신 iin_slope와 iin_offset을 이용해 먼저 곱셈을 할 수 있다. 그런 다음 결과를 iin_slope_shift와 iin_offset_shift를 이용해 우측 자리로 이동시킨다. 예를 들어 y = ki × x + mi× z과 같은 계산 대신 다음의 계산을 이용할 수 있다:
y = [(iin_slope × x) >> iin_slope_shift]
+ [(iin_offset × z) >> iin_offset_shift]
입력-전압 측정과 캘리브레이션
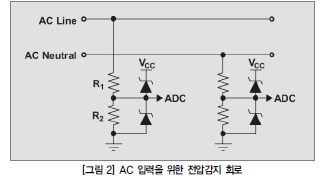
전압 감지 회로는 아주 단순해서 그림 2에서처럼 디바이더가 될 수 있다. 대개 클램프 다이오드가 ADC 핀을 보호한다. 다이오드의 역 누출 전류가 ADC의 측정 정확도에 영향을 미치므로 역 누출 전류가 적은 다이오드를 선택해야 한다.
어느 지점에서든 입력 전압은 다음과 같다:
V=KvCv-mv (7)
여기에서 kv는 전압 감지 게인이고 Cv는 ADC 변환 출력(카운트)이다. 또한 mv는 전압 감지 오프셋이다. kv와 mv를 전류 감지 게인 및 오프셋을 캘리브레이션하는 것과 비슷한 방식으로 캘리브레이션할 수 있다. 하지만 이보다 훨씬 더 간단한 방법은 그냥 도식에서 계산하는 것이다. 캘리브레이션이 없으므로 디바이더에 사용되는 저항 정확도가 측정 정확도에 영향을 미친다. 허용공차가 낮은 레지스터를 디바이더로 사용할 것을 권장한다. 예컨대 0.1% 허용공차를 권장한다.
12 bit ADC를 가지고 있고 2.5 V로 레퍼런스되는 디지털 컨트롤러의 경우, 입력 전압은 디바이더를 통해 2.5 V 미만의 크기로 감쇠된다. 그 후, 감쇠된 신호는 ADC를 통해 디지털 신호로 변환된다.
따라서,
.jpg)
방정식 8을 다시 바꾸면, 입력 전압을 다음과 같이 계산할 수 있다:
따라서,
.jpg)
그리고
입력 전류 측정과 비슷하게 전압 감지 게인 및 오프셋도 조정해야 고정소수점 마이크로프로세서를 수용하고 계산 오차를 줄일 수 있다.
VIN과 IIN보정
실제 입력 전력은 다음과 같이 정의된다:
분리 형식으로 정의하면 다음과 같다:
.jpg)
여기에서 N은 샘플의 총 수이다. 방정식 13은 VIN과 IIN을 동시에 샘플링해야 한다는 것을 보여주고 있다. 하지만 VIN과 IIN은 두 개의 서로 다른 ADC 채널을 통해 서로 다른 시기에 샘플링된다. 작은 시간차라도 측정 오차를 낳을 수 있다. 텍사스 인스트루먼트의 UCD3138 같은 일부 디지털 컨트롤러의 경우, 듀얼 샘플-앤-홀드(dual sample-and-hold)라는 메커니즘으로 이 두 채널을 동시에 샘플링해 이러한 오차를 없애고 있다.
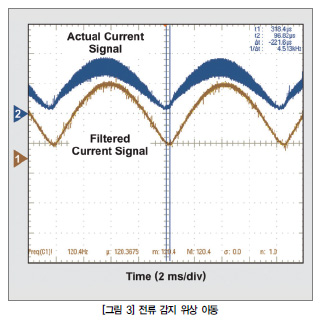
전류 감지 회로에 사용되는 로우-패스 필터 때문에 실제 전류에서 측정되는 전류 신호는 지연되어 위상이 달라진다. 이것은 그림 3에서 볼 수 있다. 여기에서 채널 2는 실제 전류 신호이고 채널 1은 증폭된 동일 신호로 로우-패스 필터에서 나온다. 증폭된 신호는 약 220 μs의 위상 딜레이를 가지고 있다.
이러한 딜레이는 보정해야 한다. 그렇지 않을 경우, 입력 전압 측정의 정확도에 영향을 미치게 된다. 간단한 보정 방법은 약 220 μs까지 VIN 감지 신호를 지연시킨 후 지연된 VIN 신호를 이용해 입력-전력 계산을 하는 것이다. VIN을 20 μs마다 측정할 경우, 220/20 = 11배까지 지연시켜야 한다.
실제 입력 전력의 계산
방정식 1, 7, 13을 조합하면 다음과 같다:
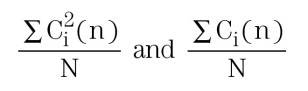
VIN과 IIN은 표준 인터럽트 루프에서 ADC를 통해 측정된다. 이것은 시간이 한정돼있어 주로 PFC 루프 제어에 사용된다. 따라서 표준 인터럽트 루프에서 CPU 계산 시간을 줄이고 오버플로우(overflow)를 방지하려면 이 루프에서 Cv(n)Ci(n)만 계산한다. 또한 방정식 14의 항들,

에 IIR(infinite impulse response) 필터를 제공한다. 실제 입력 전력의 최종 계산은 백그라운드 루프에서 이루어진다.
입력 RMS 전류의 계산
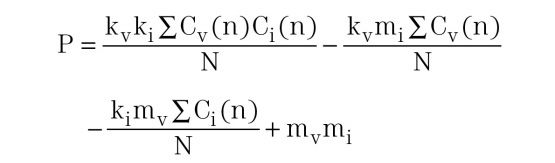
그림 1의 디지털 컨트롤러에 의한 전류 측정이 총 입력 전류를 나타내는 것은 아니다. EMI(electromagnetic-interference) 필터의 정전 용량 기여는 포함돼 있지 않기 때문이다. 이 필터 전류는 하이 라인 전압과 경부하 상태에서 더는 무시하면 안 되기 때문에 정확한 입력 전류 보고를 위해 반드시 이를 포함해야 한다.
그림 4는 간소화시킨 EMI 필터를 보여주고 있다. 여기에서는 인덕터가 제거되고 총 정전용량이 싱글 커패시터(C)로 대체되어 있다. 이 그림에서 IEMI는 EMI 커패시터의 RMS 무효 전류이고 IMeasure는 디지털 컨트롤러가 측정한 입력 RMS 전류이다. 또한 IIN는 총 입력 RMS 전류이다. EMI 필터가 생산한 무효 전류는 다음과 같다:
EMI 커패시터의 무효 전류를 계산하려면 먼저 입력-전압 주파수를 알아내야 한다. AC 라인과 중성 전압은 두 개의 ADC 채널을 통해 감지된 후, 펌웨어에 의해 교정된다. 두 개 ADC 결과를 비교하여 제로 크로싱(zero crossing)을 알아낸다. 입력 전압은 고정 속도로 샘플링되기 때문에 두 개의 연속 제로 크로싱 포인트들 사이에서 샘플의 수를 계산해 AC 주파수를 계산할 수 있다. 입력 전압 주파수를 알고 나면, EMI 커패시터의 무효 전류를 다음과 같이 계산한다:

앞서 언급했듯이, 전압은 표준 인터럽트 루프에서 측정된다. 따라서 이 루프에서 CPU 계산을 줄이고 오버플로우를 방지하려면 Cv2(n)만 계산한다.
방정식 16의 다음 항들,
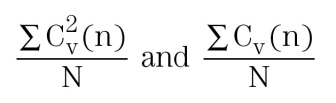
에 IIR 필터를 제공한다. 최종 EMI 무효 전류는 백그라운드 루프에서 계산한다.
ADC가 측정한 전류는 다음과 같이 정의된다:

분리 형식으로 정의하면 다음과 같다:
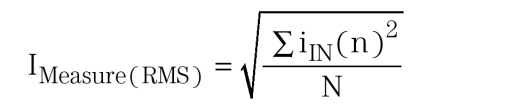
방정식 1과 18을 조합하면 다음과 같다:

앞서 언급했듯이, 전류는 표준 인터럽트 루프에서 측정된다. 따라서 이 루프에서는 Ci2(n)만 계산한다.
방정식 19의 다음 항들,

에 IIR 필터를 제공한다.
마지막으로 EMI 필터의 무효 전류(IEMI)를 IMeasure(RMS)에 더해 총 입력 전류를 얻는다. IEMI는 측정된 전류(IMeasure(RMS))를 90°까지 이끈다. 따라서,

최종 입력 RMS 전류는 백그라운드 루프에서 계산한다.
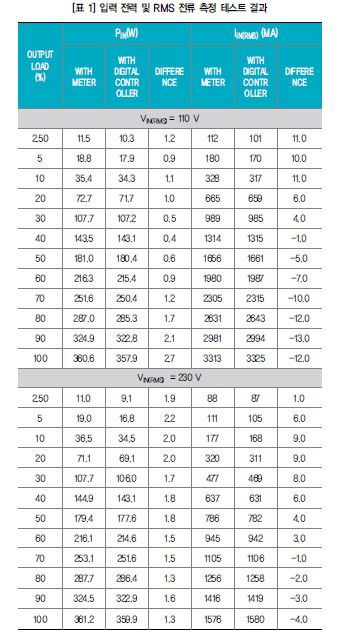
테스트 결과
이러한 입력 전력 및 RMS 전류 측정 방식을 360 W PFC 평가 모듈에서 테스트하였다. 그 결과는 표 1에 나와 있으며 이 방식의 측정 정확도가 뛰어나다는 것을 알 수 있다.
결론
오프라인 전원 공급 장치에서 입력 전력 및 RMS 전류 측정을 위한 저렴하고 정확한 방식을 제시하였다. 이러한 방식은 기존 PFC 컨트롤러 칩과 하드웨어를 이용하면서 전용 전력 미터링 칩과 추가 감지 회로를 없앴고 PFC 제어에 어떤 영향도 주지 않았다. 또한 다음과 같은 특징을 보여준다:
- 초저가
- 간단한 2 포인트 캘리브레이션
- 듀얼 샘플-앤-홀드로 VIN과 IIN을 동시에 샘플링
- 펌웨어 EMI-전류 보정
- 펌웨어 전류-감지, 위상-이동 보정
- CPU 사용량에서 오버헤드가 거의 없는 최적의 수식
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>