



글 | 아룬 T. 베무리(Arun T Vemuri), Kilby Labs 시스템 엔지니어, 텍사스 인스트루먼트
초음파주차지원 및 사각지대감지 시스템 같은 초음파 거리 측정 자동차 애플리케이션에서, 시스템이 전송한 초음파는 주변에 있는 물체에서 반사된다. 시스템은 반사된 파장이나 에코를 수신하고 물체의 에코 높이를 스레스홀드와 비교해 물체를 탐지한다. 일반적으로 스레스홀드는 시간에 따라 달라진다. 이 글은 가변 스레스홀드가 필요 없으며 스레스홀드가 고정된 상태로 유지될 수 있음을 입증한다.

초음파주차지원시스템(UPA)과 사각지대감지시스템(BSD) 같은 초음파 거리 측정 자동차 애플리케이션에서, 시스템이 전송한 초음파는 주변에 있는 물체에 부딪친 후 반사된다. 시스템은 반사된 파장이나 에코를 수신해 물체의 에코 높이를 스레스홀드와 비교하여 물체를 탐지한다. 시스템에 가까이 있을수록 물체의 에코는 멀리 있는 물체의 에코보다 더 강하다. 따라서 일반적으로 스레스홀드는 시간에 따라 달라진다고 할 수 있다. 이 글은 가변 스레스홀드가 요구되지 않으며 스레스홀드가 고정된 상태로 유지될 수 있음을 입증하고자 한다.
초음파 거리 측정
초음파 거리 측정 시스템이 사용되는 애플리케이션 중 하나가 바로 승용차의 첨단 운전자지원시스템(ADAS)이다. 전·후방 범퍼와 자동차 사이드미러에 설치된 초음파 트랜스듀서는 초음파를 송신한 후 근처 물체에서 반사된 초음파를 수신한다. 초음파의 TOF(time of flight)는 물체까지의 거리를 계산해 주차 지점을 확인하거나 운전자의 사각지대에 있는 물체를 탐지하는 등 운전자의 주차를 보조하는 역할을 한다. 최대 4대의 트랜스듀서가 전·후방 범퍼에 설치되며 1대는 각각의 사이드미러에 설치된다.
초음파 ADAS에서 압전식 트랜스듀서는 일반적으로 전기 신호를 초음파로 변환하고 반사된 초음파를 다시 전기 신호로 변환하는 데 사용한다. 반사된 파장을 수신할 때 압전식 초음파 트랜스듀서의 수신기 감도가 낮을 경우, 일반적으로 전기 신호가 매우 작게 된다.
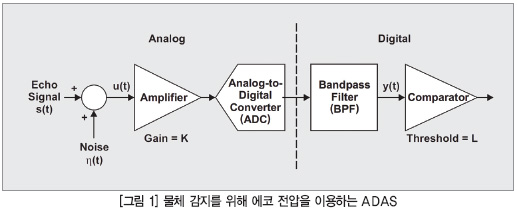
그림 1은 에코 전압을 처리하기 위해 사용한 일반적인 시그널 체인(signal chain)을 보여준다. 텍사스 인스트루먼트(TI)의 PGA450-Q1은 UPA 시스템과 같은 애플리케이션에 사용되는 통합 자동차 초음파 센서 신호 컨디셔너의 한 예이다.
초음파 수신기가 수신한 에코 신호 s(t)는 잡음에 의해 손상된다. 그림 1에서 입력기준 잡음 η (t)은 외부 환경으로부터의 잡음과 시간 (t)에 비례하는 모든 신호 체인 구성요소의 합이다. 이러한 손상된 신호 u (t)는 이득 K에 따라 증폭기에 의해 증폭되고 아날로그-디지털 컨버터(ADC)로 디지털화된다. 디지털화된 AM 신호는 대역통과필터(BPF)를 통과하며 주로 신호의 신호 대 잡음비를 개선하는 데 사용된다. 여과된 신호 y(t)를 스레스홀드 L과 비교해 물체의 존재 유무를 탐지할 수 있다. BPF 이후에는 일반적으로 비교를 위해 신호를 베이스밴드로 변환하는 진폭 변조기가 있다. 이 글의 목적을 위해 변조기는 고려하지 않는다. 따라서 물체 탐지에서 핵심이 되는 것은 스레스홀드(L)의 선택이다. 그렇다면 어떻게 L을 선택할 수 있는가?
에코 진폭
송신기에서 생성된 초음파는 반송 주파수에서 일련의 사인 곡선 펄스이며 음압 레벨(SPL)로 표시된다. SPL은 다음 공식으로 산출된다:

여기서 prms은 RMS 음압이며 pref는 기준 음압이다. 일반적으로 사용되는 기준 음압은 20 μPa 또는 0.0002 μbar이다.
물체에 대해 트랜스듀서가 생성한 초음파의 SPL은 트랜스듀서에서 물체까지의 거리에 따라 다르다. 특히, 압력은 거리에 반비례한다:
![]()
여기서 p는 음파의 압력이며, d는 트랜스듀서에서 물체까지의 거리이다. 초음파 트랜스듀서 규격은 트랜스듀서로부터 30 cm 거리까지 SPL을 제공한다. 이 값을 고려할 때 트랜스듀서로부터 임의의 거리 x에서의 SPL을 거리 법칙을 이용하여 계산할 수 있다.
![]()
여기서 x는 트랜스듀서에서 물체까지의 거리이며 x > 30 cm이다. 따라서 x에서의 SPL은 다음 공식으로 산출된다.
![]()
즉, 트랜스듀서에서 물체까지의 초음파 이동 시 음압 손실이 존재한다.
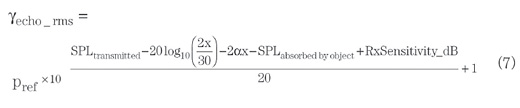
음파는 물체에서 반사되어 트랜스듀서로 되돌아가면서 음압을 추가적으로 잃게 된다. 또한 공기와 물체에서의 흡수로 인해 수신된 에코의 SPL은 페이지 맨 아래의 등식 3에 의해 대략적으로 산출되며, 여기에서 α는 공기의 흡수 계수이다. 공기가 흡수한 SPL은 공기 중 음압에 의해 이동한 거리에 비례한다는 점을 주의해야 한다. 즉, SPL 손실은 x에 비례한다.
음파가 트랜스듀서에서 물체까지 두 번 이동하기 때문에(트랜스듀서에서 물체로, 물체에서 트랜스듀서로) 인수 2가 사용된다. 식 1에 근거하여 트랜스듀서가 수신한 에코 펄스의 음압을 다음과 같이 계산할 수 있다.
![]()
초음파 수신기는 수신된 파장을 전기 신호로 변환한다. 변환 과정은 수신기 감도로 표현되며, dB 단위로 나타낸다. 1 μPa의 음압에 대해 10 V를 생성할 때, 수신기는 0 dB의 수신기 감도를 가진다. 따라서 dB로 지정된 수신기 감도를 식 5와 6을 이용해 V/μPa로 전환할 수 있다.
![]()
여기서 γ는 수신기 감도(단위:V/μPa)이다. 식 5는 다음과 같이 정리할 수 있다.

식 4, 5, 6을 식 7과 결합하면 초음파 수신기가 생산한 전압을 구할 수 있다. 식 7은 다음과 같이 정리할 수 있다.

여기서 이득(K)은 상수이다.
식 8은 트랜스듀서에서 물체까지의 거리 x가 증가할수록 에코 전압이 감소함을 보여준다.
즉, 물체가 가까울수록 에코 진폭이 커지며 물체가 멀리 있을수록 에코 진폭이 작아진다.
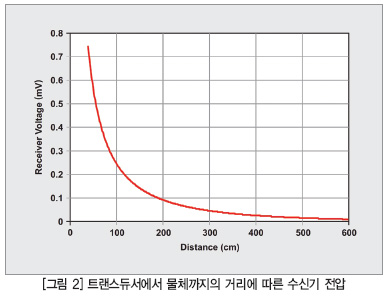
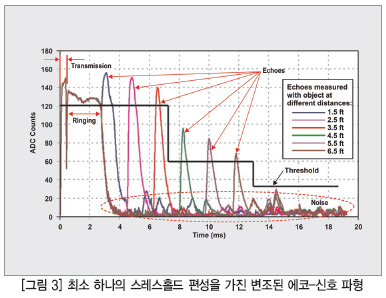
그림 2는 이러한 매개변수를 고려해 트랜스듀서에서 물체까지의 거리에 비례하여 수신된 전압을 보여준다.
·전송된 SPL = 106 dB, 30 cm
·공기 흡수 = 1.3 dB/m
·물체 흡수 = 0 dB
·수신기 감도 = -85 dB
가변 스레스홀드 스케줄링
지금까진 트랜스듀서에서 물체까지의 거리가 증가할 때 물체에서 수신된 에코의 진폭이 감소한다는 사실을 보여주었다. 더 나아가 에코 처리 경로의 입력 신호가 u(t) = s(t) + η(t)이며, 여기에서 s(t)는 에코 신호이며 η(t)는 입력 기준 잡음임을 그림 1에서 알 수 있다. 다시 말해 에코 처리 시스템은 거리에 따라 진폭이 줄어들 뿐만 아니라, 잡음에 의해 손상되는 에코 신호를 처리함으로써 물체의 존재를 탐지해야 한다. 스레스홀드를 선택할 때 일반적으로 취할 수 있는 접근방법은 스레스홀드 스케줄링이다.
이 방법에서 스레스홀드는 시간에 따라 변한다. 특히, 스레스홀드는 초음파가 전송된 직후에 높은 값으로 설정되며, 이후 시간이 증가함에 따라 감소한다. 이러한 접근방식에 대한 근거는 스레스홀드를 결정하기 위해 신호 진폭에서 예측 가능 소멸을 사용하는 것이다. 물체에 가까울수록 물체를 감지하기 위한 에코와 스레스홀드는 더 커진다. 물체에서 더 멀어지면 에코와 스레스홀드는 더 작아진다.
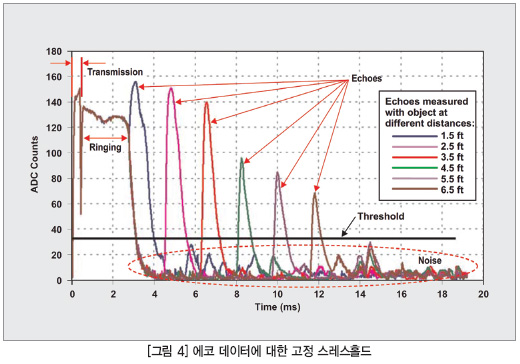
가변 스레스홀드에 대한 개념은 그림 3에서 설명하고 있다. 이 그림은 다른 거리에 있는 물체와 관련한 변조된 에코의 여러 샘플을 보여준다. 파형 데이터를 수집하기 위해 TI의 PGA450-Q1 평가 모듈을 이용한 테스트 설정이 사용됐다. 이 그림은 하나의 가능한 스레스홀드 스케줄링이다.
가변 스레스홀드 스케줄링 작업이 일반적으로 효과가 있긴 하지만, 다음과 같은 두 가지 단점이 있다:
1. 가변 스레스홀드 스케줄링 시, 편성표에 시간 대 스레스홀드를 저장하기 위한 메모리가 디바이스 내에 있어야 한다. 스레스홀드가 그림 3과 같이 3개의 가능한 값을 가지는 경우, 표는 6개의 항목을 가질 수 있다. 또한 자동차의 첨단운전자지원시스템(ADAS)의 경우, 트랜스듀서를 범퍼나 사이드미러 어디에나 장착할 수 있기 때문에 사용자는 여러 잠재적 설치 위치에 항목을 저장할 수 있다. 예를 들어, 트랜스듀서를 10군데에 설치할 수 있는 경우, 최대 60개의 항목을 디바이스에 저장해야 한다. 이를 위한 추가 메모리가 필요하기 때문에 디바이스 비용이 증가한다.
2. 시스템 제조업체는 범퍼와 사이드미러에 트랜스듀서를 설치한 후 스케줄 표를 “보정”한다. 보정은 스레스홀드와 스레스홀드를 전환해야 하는 시간을 결정하는 과정이다. 보정은 일반적으로 많은 시간이 소요된다. 특히 표에 여러 항목이 필요한 경우에는 많은 시간과 함께 많은 비용이 소요된다.

요약하면, 가변 스레스홀드 스케줄링의 주요 단점은 초음파 거리 측정 시스템의 총 비용이 증가한다는 점이다.
고정 스레스홀드
시간에 따른 스레스홀드를 사용하는 가변 스레스홀드 접근방법과 달리, 고정 스레스홀드 방식은 기본적으로 신호 잡음을 사용한다. 시스템에서의 잡음은 물체가 없는 경우 물체를 탐지하지 않도록 스레스홀드를 결정하는 데 사용된다.
그림 1에서 에코 처리 경로로의 입력 신호가 u(t) = s(t) + η (t)임을 알 수 있었다. 에코 신호는 반송 주파수에서 일련의 사인 곡선 펄스 fc(t)이며 다음 식에 의해 산출된다.
![]()
여기서 S는 에코 신호의 진폭이다. 따라서 방정식 10은 증폭된 신호의 RMS 값을 제공한다:

이러한 일련의 펄스는 짧은 기간 동안에만 발생해 신호의 진폭이 장시간 변조되는 것처럼 보인다.
대역통과필터(BPF)의 y(t) 출력은 다음 공식으로 산출할 수 있다.
![]()
여기서 (BPF)는 BPF의 디지털 필터 함수이며, (ADC)는 ADC의 양자화 함수이다. 에코 신호에 대한 기준 시간 t0 = 0임을 가정할 때(일반적으로 초음파가 송신기에 의해 송신되는 시간), 물체는 y(t) < L, tend < t < tobject 및 y(tobject)≥ L 조건 하에서 시간 tobject에 존재하며, 여기서 tend는 영보다 크고 전송된 펄스의 이니셜 버스트의 끝을 의미한다.
![]()
다음과 같은 의문이 들 수도 있다: “가변 스레스홀드 스케줄링을 사용하는 대신 고정 스레스홀드를 사용할 수 있는가?” 이 질문에 대한 답을 하기 위해서는 방정식 12를 이용하고 t가 순시값이라고 가정하여 잡음 컴포넌트들을 고려할 수 있다.
변수는 다음과 같이 정의된다:
K = 증폭기 이득
ηext(t) = 외부 잡음
ηamp(t) = 증폭기 잡음
ηADC(t) = ADC 회로 잡음
q(t) = ADC 양자화
ηBPF(t) = BPF 계산에서의 산술적 오류
개별 잡음 컴포넌트는 서로 독립적이다. 또한 각각의 잡음 컴포넌트는 평균 0과 0 이외의 변수를 가진 가우시안이다.
방정식 9와 12를 방정식 11로 대체할 때 BPF 출력은 다음과 같다:

방정식 9를 근거로, BPF 잡음의 RMS는 다음과 같다.

여기서 Q는 BPF의 양호도(quality factor), fs는 ADC 샘플링 주파수이며 모든 잡음은 RMS 값이다.
방정식 14에서 설명한 잡음의 RMS를 고려하고 6.6 파고율을 가정할 때 선택한 스레스홀드는 다음과 같다:

이전 방정식은 다음으로 표시할 수 있다:

관련 웹사이트
amplifier.ti.com
www.ti.com/product/PGA450-Q1
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>



