



이 글은 MR16 램프에 전류를 공급하는 저주파수 AC 트랜스포머와 전자식 트랜스포머의 동작에 대한 차이를 설명하고 MR16 할로겐램프와 LED MR16 램프의 전류 소비의 차이를 알아본다. 또한, MR16 램프에 최적화된 고휘도(HB) LED 드라이버가 어떠한 방식으로 LED 램프를 대부분의 전자식 트랜스포머와 호환 가능하게 만들어 주는 지 보여줄 것이다.
글 | 수레쉬 하리하란 (Suresh Hariharan)
이사 겸 제품 정의 책임자
맥심 (Maxim Integrated Products)
 MR16 램프에 전류를 공급하는 저주파수 AC 트랜스포머와 전자식 트랜스포머의 동작에 대한 차이를 설명하고 MR16 할로겐램프와 LED MR16 램프의 전류 소비의 차이를 알아본다. 이러한 차이가 중요한 이유는 흔히 전류 소비의 문제로 MR16 LED 램프가 대부분의 전자식 트랜스포머와 동작하지 못하기 때문이다. 또한, MR16 램프에 최적화된 HB LED 드라이버가 어떠한 방식으로 LED 램프를 대부분의 전자식 트랜스포머와 호환 가능하게 만들어 주는 지 제시할 것이다. 디머와 LED MR16 램프를 위한 전자식 트랜스포머의 결합으로 구현되는 깜박임 없는 동작에 대해서는 자세히 다루지 않는다.
MR16 램프에 전류를 공급하는 저주파수 AC 트랜스포머와 전자식 트랜스포머의 동작에 대한 차이를 설명하고 MR16 할로겐램프와 LED MR16 램프의 전류 소비의 차이를 알아본다. 이러한 차이가 중요한 이유는 흔히 전류 소비의 문제로 MR16 LED 램프가 대부분의 전자식 트랜스포머와 동작하지 못하기 때문이다. 또한, MR16 램프에 최적화된 HB LED 드라이버가 어떠한 방식으로 LED 램프를 대부분의 전자식 트랜스포머와 호환 가능하게 만들어 주는 지 제시할 것이다. 디머와 LED MR16 램프를 위한 전자식 트랜스포머의 결합으로 구현되는 깜박임 없는 동작에 대해서는 자세히 다루지 않는다.
저항 부하와 전자식 트랜스포머의 중요성
MR16 할로겐램프는 일반적으로 저전압 AC 소스로부터 동작하며, 이 저전압 AC 소스는 보통 저주파수 AC 트랜스포머 또는 고주파수 전자식 트랜스포머에 의해 생성된다. 대부분의 MR16 애플리케이션에서, 전기 회사에 의해 제공되는 고전압 AC는 고주파수 전자식 트랜스포머나 저주파수 자기 트랜스포머에 의해 저전압 AC로 변환된다. 고주파수 전자식 트랜스포머는 120VAC/230VAC에 직접 연결되는 1차 권선을 갖는다. 이 트랜스포머는 높은 스위칭 주파수를 사용해 MR16 할로겐램프에 인가되는 저전압(12VAC)을 제공한다.
저주파수 AC 트랜스포머는 부피가 크고 무거우며 많은 공간을 차지한다. 이에 비해 전자식 트랜스포머는 크기가 작은 초소형으로 20 W 이상의 일반 전력 수요를 가지며 저항 부하에 전력을 공급하도록 설계됐다. 그러나 전자식 트랜스포머가 120VAC/230VAC에서 전력을 공급받을 경우, 출력의 저항 부하가 20 W 미만을 소비한다면, 대부분은 제대로 동작하지 않는다.
기존 할로겐 MR16 램프는 일반 동작 조건에서 AC 소스로부터 20 W 이상의 전력을 소비하므로 전자식 트랜스포머에서도 잘 동작한다. 그러나, LED MR16 램프는 35 W MR16 할로겐램프와 동일한 광 출력을 제공하는데 7 W의 전력만 필요로 한다.
저항 부하와 밝기
MR16 할로겐램프는 비선형 저항 부하로 동작한다. 램프가 식으면 저항이 낮아지고 높은 전류를 소비해 전자식 트랜스포머의 동작을 지원한다. 램프가 다시 켜지면 필라멘트가 뜨거워지고 저항이 증가한다. 일반적인 35 W 할로겐램프는 전자식 또는 자기 트랜스포머에서 전력을 공급받을 때 120VAC/230VAC에서 35 W 전력을 소비한다. 할로겐램프는 저항 부하이기 때문에 라인 전압이 떨어지면 밝기가 어두워지고 라인 전압이 증가하면 밝기가 밝아진다.
밝기가 밝아지고 어두워지는 이러한 동작은 오늘날의 대부분의 애플리케이션에서 요구되는 동작과는 거리가 멀다. 그러나, MR16 LED 램프의 경우에 라인 전압이 변화할 때 MR16 LED 램프의 밝기를 일정하게 유지하는 것은 가능하다. 단, LED MR16 램프는 전자식 트랜스포머가 요구하는 저항 부하가 아니다. 따라서 원하는 광 출력을 제공하고 전자식 트랜스포머의 동작을 유지하는 데 필요한 전력을 소비하도록 LED MR16 램프의 부하 특성을 조정할 필요가 있다.
정전류 부하를 위한 LED 램프 최적화
MR16 LED 램프의 드라이버 회로는 전자식 트랜스포머의 출력으로부터 정전류 부하를 소비하도록 조정할 수 있다. 전자식 트랜스포머의 출력에 커패시터를 추가할 수는 없다. 이렇게 하면 MR16 LED 램프가 정전류 부하로 동작하지 못할 수 있기 때문이다. 더욱이 MR16 LED 램프에 의해 소비되는 전류는 매우 빠른 속도로 프로그래밍된 전류까지 램핑 업해야 한다. 특히 3 μs 또는 4 μs 내에서 프로그래밍된 값까지 상승시킬 필요가 있는데, 이보다 더 느리게 램핑 업 할 경우 전자식 트랜스포머의 스위칭이 멈출 수 있다.
HB LED 드라이버를 위한 새로운 설계는 대부분의 전자식 트랜스포머가 MR16 LED 램프와 매끄럽게 지속적으로 동작하게 한다. MR16 램프에 의해 소비되는 전류는 램프에 인가되는 RMS 전압으로 조정한다. 전압이 낮을 때 MR16 램프는 일정한 양의 전류를 소비한다. 입력 전력을 일정하게 유지하기 위해 RMS 입력 전압이 증가하면, 이 전류는 감소한다.
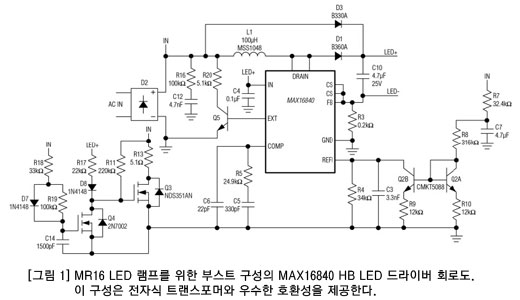
이 HB LED 드라이버는 대부분의 애플리케이션에 적합한 0.2 Ω, 48 V MOSFET을 내장하고 있다. 이 드라이버는 6~40 V의 LED 스트링 전압으로 구성할 수 있다. 스트링의 LED 수가 6보다 크면 드라이버를 부스트 구성으로 사용할 수 있다. LED가 6보다 작을 경우 SEPIC 구성으로 사용해야 한다. 이 글에서는 부스트 구성만을 다루기로 한다. 그림 1은 부스트 구성의 회로도를 보여준다.
호환 가능하게 만들기
MAX16840은 평균 전류 모드 제어를 사용해 입력 전류를 제어한다. 전류 감지 저항 R3의 전압은 REFI 핀의 전압에 의해 제어된다. 저항 R3의 평균 전압은 REFI 핀의 전압에 의해 각 스위칭 사이클에 대해 레귤레이트 된다. 스위칭 주파수는 내부에서 300 kHz로 설정된다. R3의 최대 전압은 200 mV로 클램핑되므로 전류는 0.2/R3을 초과할 수 없다. 브리지 정류기는 다이오드 브리지 D2의 핀 3에 정류된 입력 전압을 제공한다. 이렇게 정류된 전압은 이제 R7 및 C7에 의해 평균화된다. C7의 DC 전압은 저항 R8에 의해 전류로 변환된다. Q2, R10, R19로 구성되는 전류 미러 회로는 REFI 핀에 전류 싱크를 생성한다. 여기서 싱크 전류(= VC7/R8)는 Q2B에 의해 발생된다. 따라서 REFI 핀의 전압은 (50 μA- VC7/R8) × R4가 되고, 이때 50 μA는 REFI 핀에 존재하는 내부 전류 소스이다. R8 및 R4의 값은 ±10% 입력 전압 변화에 대해 입력 전력이 ±5% 내에서 변화하도록 조정한다. 이러한 설계는 ±10%의 라인 전압 편차에 대해 입력 전력이 거의 일정하도록 유지시킨다.
부스트 인덕터는 100 μH로 설정되어 낮은 입력 전류 리플을 제공하므로 전자식 트랜스포머와의 호환성을 향상시킨다. 다이오드 브리지의 핀 3에 나타나는 정류된 전압의 하프 사이클마다 전자식 트랜스포머의 전압이 제로에 가까워질 때 입력 전류는 제로가 된다. 정상 동작을 위해 MR16 램프에 의해 소비되는 전류가 전자식 트랜스포머의 스위칭 한 사이클 내에 REFI 핀에서 프로그래밍된 전류 값으로 상승하는 것이 중요하다. 램프에 의해 소비되는 전류가 전자식 트랜스포머의 동작을 유지하기 위해 원하는 전류보다 훨씬 낮을 경우 LED 램프가 깜박이기 시작한다. 여기에서는 100 μH 인덕터가 사용되므로 전류가 제로에서 램핑 업 하는 데에는 시간이 다소 걸린다. 따라서 일부 전자식 트랜스포머는 스위칭을 멈춘 다음 재시작하면서 깜박일 수 있다.
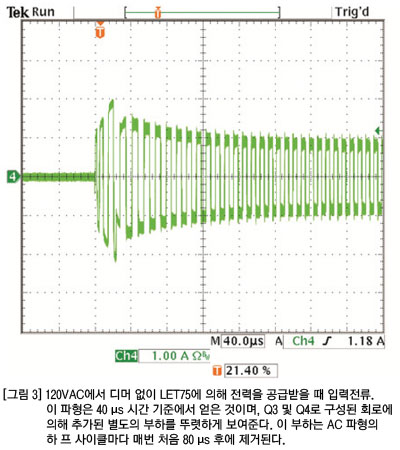
이러한 문제를 해결하기 위해, 이 회로 설계는 R18, D7, C14, Q4, D8, R17, R11, R13, Q3로 구성되는 추가 부하를 갖는다. 이 회로는 전자식 트랜스포머에 5 Ω를 추가하지만 정류된 AC 사인파의 하프 사이클 당 약 80~90 μs 동안뿐이며, 이것은 보통 100 Hz/120 Hz의 주파수를 갖는다. 부하는 인덕터의 전류가 트랜스포머 동작을 지속적으로 유지할 수 있을 정도로 충분히 높게 램핑 업되는 즉시 제거된다. 이 추가 부하에 의해 소비되는 전력은 작다.
문제를 해결하는 또 다른 방법은 부스트 인덕터를 10 μH로 낮추고 높은 스위칭 주파수에서 동작하면서 추가 부하를 없애는 것이다. 높은 스위칭 주파수는 높은 스위칭 손실을 발생시키지만 추가 부하가 필요 없다. 위에서 언급한 두 가지 방법은 모두 Maxim Integrated Products에서 개발한 고유 방법이다.
MAX16840은 IN 핀의 전압이 5 V 미만일 때 외부 트랜지스터를 구동하기 위한 EXT 핀이 있다. 내부 MOSFET은
오프 상태가 된다. EXT 핀이 Q5를 켜고 5 Ω 부하가 브리지 정류기의 출력에 추가된다. IN 핀의 전압이 5 V를 초과하면, 이 부하는 꺼진다. 이러한 방법은 전자식 트랜스포머가 트레일링 에지(trailing-edge) 디머와 함께 작동할 때 유용하다. 일부 전자식 트랜스포머와 디머 결합의 경우 디머를 최소 광 출력으로 설정할 때 트랜스포머가 적절히 동작하지 않는다. 이러한 현상은 디머가 최소로 설정되고 AC 전원이 트랜스포머에 인가될 때 발생한다. Q5, R20의 회로와 MAX16840의 EXT 핀은 전자식 트랜스포머에 5 Ω 부하를 추가함으로써 이러한 문제를 극복한다. IN 핀이 부스트 출력 전압에 직접 연결되어 있기 때문에, 이 부하는 LED가 켜지고 빛을 제공하는 즉시 제거된다.
전자식 트랜스포머와 호환성 시연
여기에 제공된 성능 데이터는 서로 다른 전자식 트랜스포머에서 전력을 공급받을 때 6 W 부스트, MR16 LED 램프를 보여준다. 부스트 MR16은 출력에서 7개 LED로 시험됐다. 표 1과 2는 서로 다른 트랜스포머에 대한 성능을 요약한 것이다.
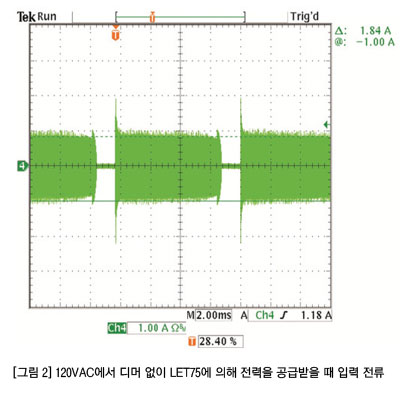
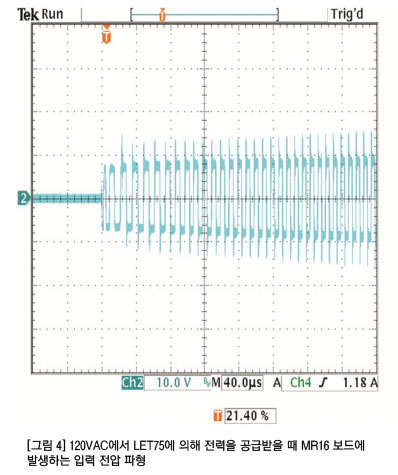
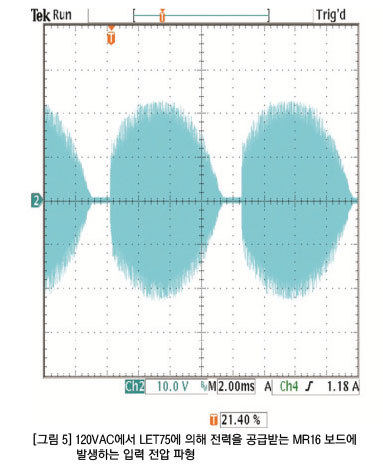
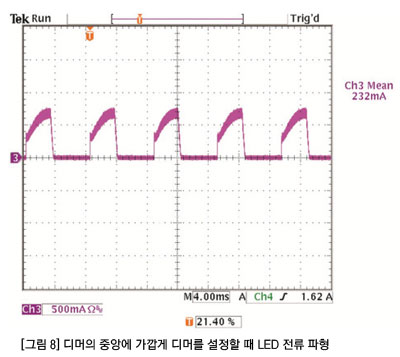
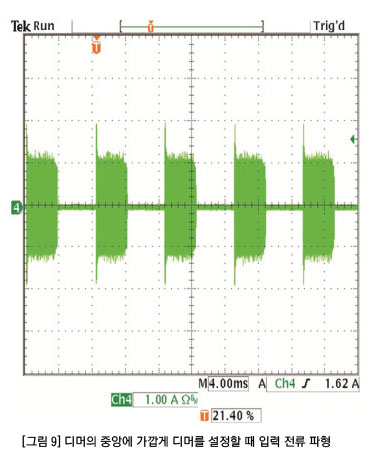
디밍 성능(그림 2~11)은 LET75 및 Lutron짋 SELV-303P 디머로 시험됐다.
.jpg)



결론
MR16 및 기타 12V AC 램프에 최적화된 HB LED 드라이버를 사용하면, MR16 LED를 전자식 트랜스포머와 호환 가능하게 만들 수 있다. 여기에 시연된 LED 드라이버는 MAX16840이 사용됐다. 한 가지 언급하고 싶은 것은 각각의 전자식 트랜스포머와 디머의 결합이 갖는 성능은 시험을 수행해야 한다는 점이다.
시험은 일부 트레일링 에지 디머와 전자식 트랜스포머의 결합이 만족스럽게 동작한다는 것을 보여준다. Triac 디머는 전기 용량의 부하와 함께 동작하도록 설계되어 있지 않기 때문에, 전자식 트랜스포머와 제대로 동작하지 않는다. 전자식 트랜스포머의 EMI 필터는 전자식 트랜스포머의 입력에서 다른 커패시터와 결합할 경우 디머와 함께 사용할 때 링잉을 발생시킨다. 이 링잉은 다시 같은 구성에서 MAX16840을 사용해 전자식 트랜스포머의 출력을 LED 램프에 연결할 경우 깜박임을 발생시킨다. ES
| 유블럭스, 日유피테르에 QZSS 기술 공급 유블럭스는 통신기기 및 자동차 전자부품 제조업체 유피테르(Yupiteru) 사에 최첨단 QZSS 위성 포지셔닝 기술을 공급한다. 터치스크린이 장착된 GWR73SD 레이더 탐지기는 유블럭스의 QZSS 대응 LEA-6H 위성수신기 모듈을 기반으로 향상된 포지셔닝 성능과 레이더 탐지기능, 차량진단 기능을 제공한다. 유피테르 사의 마케팅 담당 아츠시 이시바시(Atsushi Ishibashi)는 “유블럭스의 빠른 상용화로 최초의 QZSS 위성을 이용해 신뢰성 높은 포지셔닝 장치를 사용할 수 있었다”며 “GPS 위성이 초고층 빌딩으로 가로막힐 수 있는 일본 도시환경에 있는 운전자들에게는 GWR73SD는 유용한 제품이다”고 말했다. QZSS(Quasi-Zenith Satellite System, 준천정 위성 시스템)’는 높은 고도의 준 극궤도(quasi-zenith) 위성을 기반으로 일본과 동남아시아 지역을 지원하는 새로운 GPS 위성항법 보강시스템을 뜻한다. 이 시스템은 일본 바로 위족 상공의 정지궤도에 위성이 위치해 도쿄같은 협곡형 도시지역에서 1 m 미만까지 GPS 정확도를 높일 수 있다. 최초의 QZSS 위성은 2011년도부터 운용됐다. 2010년대 말에 4개 위성 배치가 완료됐다. |
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>



