VDA 5050 인터페이스 기반의 플릿 관리 시스템(Fleet Management System, FMS)은 서로 다른 제조사의 무인운반차(AGV)를 통합 제어할 수 있다. 그러나 자동화 공정을 위한 상위 제어 시스템이 실제로 필요한지 아닌지는 구체적인 사용 사례에 따라 달라진다. 다음 세 가지 시나리오는 어떤 경우에 어떤 솔루션이 적합한지를 보여준다.
모든 경우에 중앙 집중식 플릿 관리가 필요한 것은 아니다. 결정적인 요소는 구체적인 적용 분야, 프로세스 요구사항, 각 기업의 전략이다. 예를 들어, 단일 제조사의 무인 운반 차량이 박스나 팔레트의 단순 운송에 사용되는 경우, 중앙 제어 시스템 없이도 차량 간 통신이 원활히 이루어질 수 있다.
중앙 제어 시스템 없이 모바일 운송 로봇 활용
독일의 세이프로그(SAFELOG GmbH)와 같은 제조사는 용도에 맞는 다양한 크기의 모바일 운송 로봇을 제공한다. 에이전트 기반(Agent-based) 제어 시스템은 소수의 차량으로도 경제적인 운영을 가능하게 한다. 기기 간 통신은 Wi-Fi를 통해 이루어지며, 군집 지능(swarm intelligence)을 통해 중앙 제어 시스템 없이도 운영이 가능하다. 이 접근 방식에서는 이송 스테이션 및 주변 기기도 시스템에 통합될 수 있다. 하드웨어와 소프트웨어가 통합된 패키지는 자동화 공정을 간단하고 비용 효율적으로 구현할 수 있게 한다.
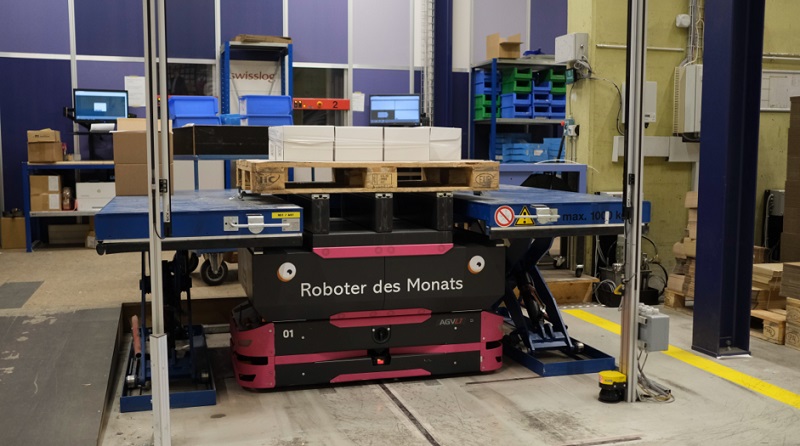
모바일 운송 로봇을 사용할 때 중앙 제어 시스템이 항상 필요한 것은 아니다. SAFELOG의 에이전트 기반 제어 시스템을 통해 차량 간 상호 통신이 가능하며, 이송 스테이션도 시스템에 통합할 수 있다.
스위스의 선도적인 유통 기업 안탈리스 스위스(Antalis Switzerland)는 이를 활용하고 있다. 이 회사는 매일 최대 1,600건의 주문을 처리하며, 40년 된 기존 플릿을 세이프로그의 에이전트 기반 제어 시스템을 적용한 최신 차량으로 교체했다. 기존 이송 스테이션과 인터페이스는 새로운 시스템에 맞게 조정되어 그대로 유지될 수 있었다. 모바일 로봇을 통해 입고 및 출고 영역이 최적으로 연결됐다. 매일 약 700개의 팔레트(최대 약 1,000kg)가 입고 구역에서 고층 창고, 오토스토어(Autostore) 창고, 그리고 세 개의 수동 창고를 포함한 다양한 보관 구역으로 운반된다.
이 사례는 팔레트와 개별 박스를 옮기는 경우는 물론, 전체 컨테이너와 트롤리를 견인하는 경우에도 소수의 AGV로 구성된 시스템이 상위 제어 센터 없이 효율적으로 구현될 수 있음을 보여준다. 또한 조립 스테이션 역시 상위 제어 시스템 없이 AGV를 통해 효과적으로 연결될 수 있다.
군집 지능과 중앙 제어의 결합
자동화 공정이 더 복잡해질 경우, 일부 상황에서는 중앙 제어 시스템과 에이전트 기반 차량의 결합이 적합할 수 있다. 이 경우 중앙 제어 시스템은 주문 관리를 담당하고, 군집 지능은 출발지와 목적지 간 실제 운송을 관리한다.
크놀 마쉬넨바우(KNOLL Maschinenbau GmbH)는 바로 이 방식을 도입했다. 판금 생산 공정의 엄격한 사이클에서 세이프로그의 모바일 운송 로봇은 정해진 경로를 돌며 5개의 스테이션에 자재를 공급한다. 각 스테이션에는 고정 체류 시간이 설정되어 있어 작업자는 해당 시간 동안 자재를 하역하거나 가공된 반제품을 적재할 수 있다.

크놀 마쉬넨바우는 군집 지능을 활용한다: 판금 생산의 엄격하게 정해진 사이클에서 세이프로그의 모바일 운송 로봇이 사용되며, 5개의 정지 지점을 순회한 뒤 판금 창고로 돌아간다.
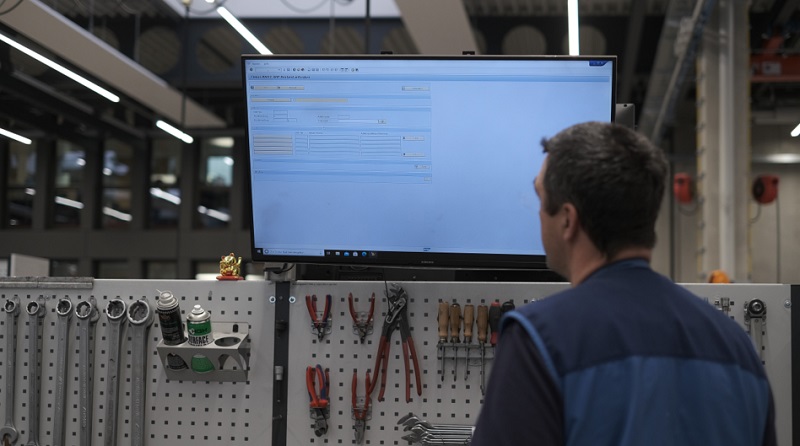
각 스테이션의 사이클 타임은 플렉서스 아게(FLEXUS AG)의 SAP 제어 소프트웨어를 통해 모니터링된다. 지연이 발생하면 로봇이 음향 신호로 작업자에게 알린다. 또한 무거운 트롤리를 운반하기 위한 추가 로봇이 대기하고 있다. 작업이 완료되면 작업자는 PC의 SAP 인터페이스(UI)를 통해 픽업을 요청한다. 로봇은 트롤리 아래로 이동해 4개의 연결 지점에 도킹한 후 창고, 생산, 또는 출하 구역으로 운반한다.
모바일 운송 로봇뿐만 아니라 다른 산업용 차량과 터거 트레인도 플렉서스 아게의 운송 제어 시스템을 통해 통합됐다.
경로 안내는 주로 윤곽 기반 내비게이션을 사용하며, 최단 경로가 막힌 경우 제어 소프트웨어가 AGV에 이를 알리고 대체 경로를 자동으로 선택한다. 이를 통해 KNOLL은 하루 약 1,000개의 컨테이너와 트롤리를 운반한다. 이 시스템에는 운송 로봇뿐만 아니라 다른 산업용 차량과 터거 트레인도 FLEXUS 운송 제어 시스템을 통해 통합됐다. 모든 참여 요소가 추적되고, 배터리 상태나 운송 작업 진행 상황 등의 데이터가 지속적으로 기록된다.

다양한 자율 지게차, 터거 트레인, 모바일 운송 로봇 및 기타 자원을 중앙 제어 스테이션을 통해 최적으로 제어할 수 있다.
VDA 5050 기반 제어 시스템의 효과적 활용
창고 및 물류 센터의 제조사와 운영자는 다양한 자동화 요구를 충족하기 위해 여러 제조사의 장비를 동시에 사용하는 경우가 많다. 이러한 환경에서 장비 간 동기화를 위해 VDA 5050 인터페이스가 개발됐다. 이를 통해 자율 지게차, 터거 트레인, 모바일 로봇 등 다양한 장비를 중앙 제어 시스템에서 통합 관리할 수 있다.
표준화된 인터페이스를 통해 제조사에 관계없이 다양한 규모의 플릿을 관리할 수 있기 때문에, 이러한 활용 사례에서는 VDA 5050 기반 플릿 매니저로의 전환이 명확한 추세로 나타나고 있다. 세이프로그 역시 VDA 5050 기반 중앙 제어 시스템을 적용한 여러 프로젝트를 성공적으로 수행했으며, 유명 자동차 제조사에서도 이를 적용해 27대 이상의 모바일 로봇을 통합 운영하고 있다.
VDA 5050이 제공하는 새로운 기회
많은 경우 군집 지능 기반의 중앙 제어 시스템 없는 운영이 충분한 유연성을 제공하며 비용도 크게 절감할 수 있다. 공정이 단순하고 차량 구성이 균일할수록 시스템 확장은 더욱 용이하다. 반면 공정이 복잡하고 다양한 제조사의 장비가 혼재된 경우에는 VDA 5050 기반 제어 시스템이 새로운 가능성을 제공하며 공정 투명성도 높여준다.

VDA 5050 기반 제어 시스템은 새로운 가능성을 열어준다. 도르트문트에서 열린 제4회 AGV Mesh-up에서는 8개 서로 다른 제조사의 로봇이 원활하게 통합될 수 있음을 보여줬다.
현재 VDA 5050은 로봇 플릿 및 제어 시스템 관련 입찰에서 필수 요구사항으로 자리 잡고 있다. 단순한 경로 기반 차량을 위한 통신 프로토콜에서 출발해, 이제는 실제 산업 환경에 적용 가능한 글로벌 표준으로 발전했다. 매년 독일 도르트문트에서 열리는 TEST CAMP INTRALOGISTICS에서는 다양한 기업들이 VDA 5050 기반으로 소프트웨어와 하드웨어를 테스트하며, 실제 물류 및 생산 공정을 최대한 현실적으로 구현한다.
특히 다양한 제조사의 차량이 교차 경로를 주행하거나 반대 방향으로 이동하는 상황에서 VDA 5050의 강점이 더욱 두드러진다. 도르트문트에서 열린 제4회 AGV Mesh-up에서는 8개 제조사의 로봇이 원활하게 통합될 수 있음을 보여줬다.
현재 개발의 초점은 지도와 구역(zone) 통합에 맞춰져 있으며, 이를 통해 자율이동 로봇(AMR)까지 완벽하게 수용할 수 있도록 지속적으로 발전할 전망이다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>