KAIST, 돌봄 로봇 및 극한 환경 산업용 로봇 등 다양한 분야에 활용
KAIST(총장 이광형)는 전기및전자공학부 정재웅 교수 연구팀이 인간 피부의 압력 감지 능력을 뛰어넘는 고감도 및 광범위 압력 측정이 가능한 로봇용 전자 피부를 개발했다.
연구팀이 개발한 전자 피부는 인간 피부에 비해 더 높은 민감도와 더 넓은 압력 측정 범위를 보여 최근 각광받는 로봇 산업, 헬스케어 산업, 증강 현실 등 다양한 분야에 폭넓게 적용될 수 있을 것으로 기대된다.
연구 배경
인간 피부의 촉각 인지 능력을 모방하는 전자 피부는 사람이 작업하기 극한 환경에서 원격으로 감도 및 외압 측정이 가능하여 메타버스, 로봇 공학, 의료 기기 등 다양한 산업에 활용이 가능하다. 이로 인해 전자피부가 많은 주목을 받고 있으며, 특히 전자피부의 핵심 기술인 압력 센서의 민감도를 향상시키기 위해 센서 내부 재료와 구조를 변형하는 등 다양한 연구가 진행되었다.
하지만, 개발된 고감도 압력 센서는 큰 압력을 견지지 못해 압력 감지범위가 좁다는 한계가 있었다. 이를 해결하기 위해 큰 압력을 견딜 수 있는 견고한 재료를 사용한 광범위 압력 감지 센서가 등장하였으나 견고한 재료가 미세한 압력의 변화를 감지하지 못하여 고감도 센서들에 비해 현저히 낮은 민감도를 보였다. 이에 따라 사용자 들은 상황과 목적에 맞춰 별개의 센서를 교체하며 사용해야 했으며 이 과정에서 측정의 정확도가 떨어지고 번거롭다는 문제가 발생했다.
연구 내용
연구에서는 기존 압력 센서가 가지는 한계를 극복하기 위해 민감도와 압력 감지범위를 변화시킬 수 있는 압력 센서를 개발했다. 개발된 압력 센서는 갈륨(Gallium)과 중합체(Polymer)를 합성하여 제작되었으며 사용자가 상황과 목적에 맞게 고감도 감지 모드와 광범위 압력 감지 모드를 손쉽게 전환할 수 있도록 설계됐다.
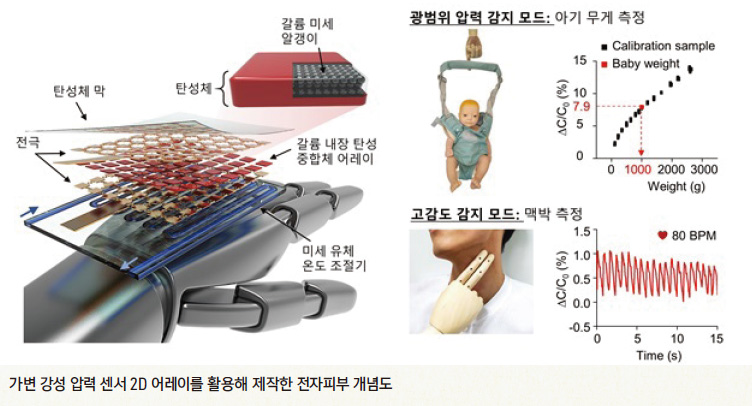
갈륨은 압력 센서의 핵심 소재로, 금속임에도 불구하고 미온 (29.76 ℃)에서 녹는점을 가져 쉽게 고체와 액체 간의 상태 변화가 가능하다. 온도 컨트롤을 통해 내장된 갈륨의 상태 변화가 가능하고 이에 따라 센서의 모드를 전환할 수 있다. 갈륨이 고체일 때는 센서가 단단하여 넓은 범위의 압력을 측정할 수 있는 광범위 압력 감지 모드가 되고, 갈륨이 액체일 때는 센서가 부드러워 미세한 압력을 감지할 수 있는 고감도 감지 모드가 된다.
연구팀은 미세유체기반 제작 방식을 통해 균일한 갈륨 미립자를 형성/활용 하여 압력 센서를 제작하였다. 이를 통해 센서간 균일성/재현성을 극대화 하여 신뢰성 높은 대면적 전자피부 제작을 가능하게 했다. 전자피부의 모드 전환을 위해 압력 센서 어레이 아래 미세유체 기반 온도 조절기를 부착하였 으며, 온도 조절기에 삽입한 유체의 온도를 컨트롤하여 전자피부의 압력 측정 민감도와 동작 범위를 변경하였다.
<저작권자©스마트앤컴퍼니. 무단전재-재배포금지>