개방형 휴머노이드 로봇 플랫폼 ‘아이작 GR00T’ 공개...초기 구동부터 기술 개발, 실제 환경 검증까지 개발 과정 단축
엔비디아가 엔비디아 GTC 타이베이(NVIDIA GTC Taipei)에서 최초의 개방형 휴머노이드 로봇 레퍼런스 디자인인 ‘엔비디아 아이작 GR00T(Isaac GR00T) 레퍼런스 휴머노이드 로봇’을 공개했다.
아이작 GR00T 레퍼런스 휴머노이드 로봇은 엔비디아 젯슨 토르(Jetson Thor)와 아이작 GR00T 오픈 개발 플랫폼을 기반으로 구축됐다. 독점 플랫폼에 의존하지 않고 고급 하드웨어와 오픈 소프트웨어 스택을 활용할 수 있도록 설계돼 휴머노이드 로보틱스 연구 접근성을 높이는 것이 특징이다.

최근 범용 휴머노이드 로봇에 대한 관심이 확대되고 있지만, 연구자들은 하드웨어 통합부터 데이터 수집, 시뮬레이션, 훈련, 평가, 배포에 이르는 복잡한 개발 과정을 개별적으로 구축해야 하는 어려움을 겪고 있다.
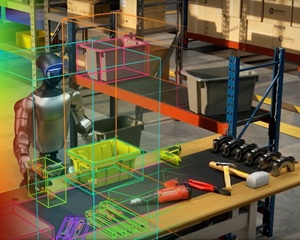
업체 측에 따르면, 아이작 GR00T 레퍼런스 휴머노이드 로봇은 유니트리(Unitree) H2 플러스 휴머노이드 로봇과 샤르파 웨이브(Sharpa Wave) 촉각 5지 로봇 손으로 구성된 하드웨어에 엔비디아 젯슨 토르 기반 온보드 컴퓨팅과 아이작 GR00T 소프트웨어를 결합한 통합 플랫폼이다. 이를 통해 연구팀은 초기 구동부터 기술 개발, 실제 환경 검증까지 개발 과정을 단축할 수 있다는 설명이다.
젠슨 황 엔비디아 창립자 겸 CEO는 “휴머노이드 로봇은 세계 최대 산업 분야에 피지컬 AI를 도입해 수조 달러 규모의 경제적 기회를 창출할 것”이라며, “아이작 GR00T 레퍼런스 휴머노이드 로봇은 연구자들에게 범용 피지컬 인텔리전스를 위한 개방형 플랫폼을 제공한다”고 말했다.
해당 레퍼런스 디자인은 사람 크기의 유니트리 H2 플러스 몸체와 촉각 기반 5지 로봇 손, 멀티뷰 카메라, IMU 센서, 젯슨 AGX 토르 T5000 컴퓨팅 모듈 등을 통합해 정교한 조작과 실시간 AI 추론을 지원한다.
엔비디아는 하드웨어와 함께 휴머노이드 개발 전 과정을 지원하는 아이작 GR00T 개발 플랫폼도 제공한다. 플랫폼에는 데이터 수집을 위한 아이작 텔레옵(Isaac Teleop), 휴머노이드 행동 학습을 위한 아이작 GR00T 파운데이션 모델, 시뮬레이션·훈련 환경인 아이작 심(Isaac Sim)과 아이작 랩(Isaac Lab), 배포를 지원하는 아이작 ROS 미들웨어 등이 포함된다고 업체 측은 전했다.
연구자들은 전체 플랫폼을 활용하거나 필요한 기능만 선택해 기존 개발 환경에 통합할 수 있다. 엔비디아는 이를 통해 휴머노이드 개발 과정에서 반복되는 인프라 구축 부담을 줄이고 연구 속도를 높일 수 있을 것으로 기대하고 있다.
엔비디아는 향후 아이작 GR00T 개발 플랫폼의 지원 범위를 유니트리 G1 휴머노이드 로봇까지 확대할 계획이다. 또한 Ai2, ETH 취리히, 스탠퍼드 로보틱스 센터, 캘리포니아 샌디에이고대학교(UCSD) 등 주요 연구기관이 해당 레퍼런스 디자인을 활용해 차세대 휴머노이드 연구를 진행할 예정이라고 밝혔다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>