



글 | 마크 피에퍼(Mark Pieper) 아날로그 필드 애플리케이션, 텍사스 인스트루먼트
본고에서는 네거티브 부스트 컨버터를 형성하기 위해 기존 네거티브 전압을 이용해 더 큰(더 많은 네거티브) 진폭으로 출력 전압을 생성하는, 표준 포지티브 벅 컨버터를 이용하는 방법에 대하여 알아본다.
서론
POL(point-of-load) 애플리케이션에서 네거티브 전압 레일을 생성하는 것과 관련해 설계자는 선택의 여지가 거의 없다. 이를 위해 특별하게 설계된 통합 기기는 일반적이지 않을 뿐만 아니라, 다른 옵션들은 너무 크고 소음이 심하며 비효율적이라는 심각한 단점을 지니고 있다. 하지만 컨버터를 위한 입력으로 네거티브 전압을 이용할 수 있는 경우에는 몇 가지 이점을 얻을 수 있다. 부스트 레귤레이터를 이용할 경우 더 작고, 효율적이며 더욱 저렴한 설계를 구현할 수 있다. 본고에서는 통합 FET 벅 컨버터를 이용하는 전체 설계 예제를 제시할 것이다. 또한 컨버터의 기본 작동 이론, 하이레벨 설계 트레이드오프, 폐쇄 루프 보정 설계도 논의할 것이다.
네거티브 부스트 토폴로지
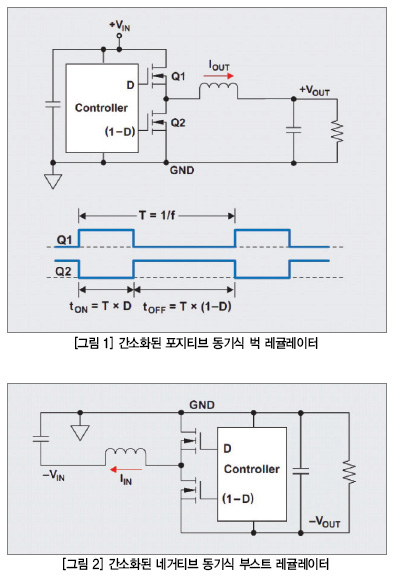
네거티브 부스트 컨버터를 이용할 경우 전력 설계와 포지티브 벅 컨버터 및 네거티브 부스트 컨버터 제어 사이에 존재하는 몇몇 병렬의 이점을 활용할 수 있다. 그림 1은 포지티브 벅 레귤레이터의 기본 작동에 대해 설명한다. 벅은 VIN를 분리하는 하프 브리지와 DC 부품을 추출하는 필터로 구성된다. 필터링된 출력 전압은 상단 FET의 듀티 사이클(D)를 변화시켜 조절된다. VOUT 이 너무 낮은 경우, 제어 루프는 D를 증가시켜 반응한다. VOUT 이 너무 높은 경우 D는 감소한다. 벅 입력 전류는 불연속(더 높은 RMS 전류)이며 출력 전류는 연속적이고, 인덕터 전류 파형과 동일하다. 인덕터를 통과하는 전류 흐름은 포지티브이며 하프 브리지에서 흘러 나간다.
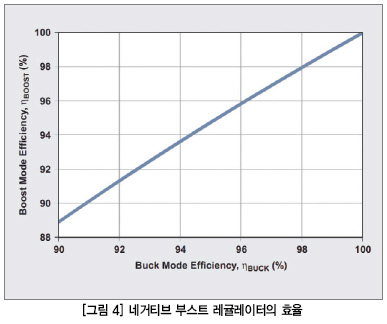
그림 2는 더 많은 네거티브 전압이 기존 네거티브 전압에서 생성되는 네거티브 부스트 토폴로지를 설명한다. D 동안 인덕터 전류가 증가하고 에너지를 저장한다(dI = -VIN × D × T/L). 1-D 동안 에너지가 출력으로 전이된다. 상단 FET를 끄고 하단 FET가 켜지면 인덕터 전류가 출력으로 흐르고 인덕터 전류가 감소할 때 부하를 지원한다. 그림 1과 2로부터 접지 아래에서 레벨 전환이 있다는 점을 제외하면 네거티브 부스트 레귤레이터는 포지티브 벅 레귤레이터와 유사하다는 점을 알 수 있다. 또한 VIN 과 VOUT은 전치된다. 다음의 일반적인 특징을 주목해야 한다:
- 상단 FET는 제어된 스위치이다.
- 인덕터 전류는 인덕터를 통과해 동일한 방향으로 흐른다(하프 브리지에서 멀리).
- D를 증가하면 VOUT 이 증가한다.
이러한 유사성이 중요한 이유는 쉽게 이용 가능한 포지티브 벅 컨버터를 이용해 네거티브 부스트 컨버터를 구성할 수 있기 때문이다. 작동과 관련한 한 가지 차이점은 벅 컨버터와는 반대로 부스트 컨버터가 불연속 출력 전류와 연속 입력 전류를 갖는다는 점이다.
컨버터 선택
컨버터를 선택할 때 고려해야 할 세 가지 사항이 있다.
1. 컨버터는 부스트 컨버터와 관련한 다른 제어 알고리즘을 수행하기 위해 외부 보정을 갖춰야 한다. 이는 다음 장에서 논의하도록 한다.
2. 컨버터는 부하 전류가 아닌 입력 전류와 동일한 프로세싱 전류이기 때문에 그에 따라 전류 정격 및 전류 제한 크기를 조정해야 한다. 예를 들어 효율성(η)의 효과를 무시할 경우 12 W, -6 V ~ -12 V 부스트 컨버터는 1 A(12 W)의 출력 전류와 2 A (12 W)의 입력 전류를 갖는다. 2 A를 초과하는 전류 정격을 갖는 컨버터에 이러한 설계가 요구된다. 선택한 컨버터의 출력-전류 정격은 식 1보다 커야 한다:


3. 컨버터의 VDD는 -VOUT에 의해 바이어스된다. 컨버터를 켜면 VOUT은 VIN와 동일하고 VOUT 이 조정 상태가 될 때까지 증가한다. 따라서 컨버터가 VDD = |-VIN|으로 시작할 수 있도록 컨트롤러 사양을 갖춰야 하며, 컨버터는 VDD = |-VOUT|로 작동할 수 있도록 정격화되어야 한다. 예를 들어 -6 V를 -12 V 출력으로 변환하는 설계는 VDD = 6 V로 시작하고, VDD = 12 V로 시동 후 지속적으로 실행하는 컨트롤러를 요구한다. 이는 네거티브 입력이 낮은 전압일 경우에 문제가 될 수 있다. 해결 방법은 전원 공급 장치의 VIN으로부터 분리된 VDD를 갖는 컨버터를 이용하는 것이다. 그림 3은 TI의 TPS54020을 이용해 -2.0 V를 -2.2 V로 변환하도록 설계된 네거티브 부스트 레귤레이터를 보여준다. 상대적으로 낮은 전압 레귤레이터지만 컨버터 사양이 전압을 지원한다는 점에서 원리는 -VIN 및 -VOUT과 동일하다. U1, 핀 VIN으로 전원 공급은 핀 PVIN으로의 접지와 분리되어 저전압 작동을 가능하게 함을 유의해야 한다.
앞서 언급했고 식 1에서 정의했듯이 컨버터의 전류 정격은 입력 전류에 의해 주도된다. 따라서 컨버터의 전력 손실은 출력 전류에 달려 있다.
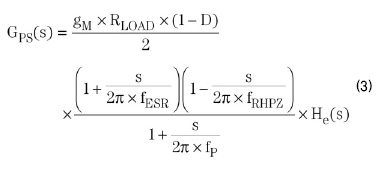
네거티브 부스트 레귤레이터(η BOOST)의 효율은 포지티브 벅 레귤레이터(η BUCK)의 효율과 관련하지만 약간 낮다. 그림 4와 식 2는 두 효율 간 관계를 보여주며 지정된 η BUCK 이 90% 이상일 때 대략적으로 동일하다.

부품 선택
벅 컨버터의 데이터시트에 정의된 것과 같은 기준을 이용해 인덕터를 선택할 수 있다. 출력 커패시터가 더 높은 RMS 전류를 위해 정격화해야 한다는 점에 유의하면서 애플리케이션이 요구하는 리플 전압에 근거하여 부스트 컨버터의 입력 및 출력 커패시터를 선택해야 한다.
제어 이론
부스트 컨버터는 벅 컨버터와는 다른 좀 더 복잡한 전송 기능을 가지고 있다. 벅 컨버터의 경우 전압 모드 제어와 전류 모드 제어간 전송 기능이 차이가 난다. 본 분석은 전류 모드 디바이스인 TPS54020에 근거한 전류 모드 제어 부스트 컨버터를 이용한다. 제어 루프 설계의 안정성을 평가하기 위해 보드-플롯(bode-plot) 방법을 사용했다. 안정성에서 가장 중요한 점은 개방 루프 게인이 단위와 교차할 때의 페이즈와, 페이즈가 -180°와 교차할 때의 게인이다. 개방 루프 게인은 제어 루프 주변의 모든 게인을 포함해 제어 전송 기능과 순방향 전송 기능을 곱한 값과 동일하다.
전류 모드 전원 스테이지(제어 용어로 “플랜트”)는 식 3에서 제공된 순방향 전송 기능을 갖는다.1)
여기에서 s는 복소 라플라스(Laplace) 변수이며 He(s)는 고주파수 역학을 의미한다. 연속 부스트는 2개의 주요한 제어 기능을 갖는다. 우선, 전류 모드 제어 효과로 인해 플랜트가 단극 시스템이다. 두 번째, 우반면 영점(RHPZ)이 있다.1), 2) RHPZ, 플랜트 폴, 및 COUT ESR(equivalent-seriesresistance) 영점 주파수는 다음 식에 의해 개별적으로 설명된다.
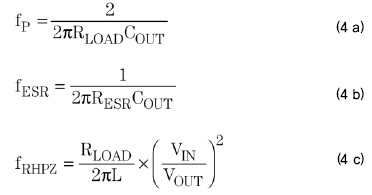
RHPZ에서 루프의 단위 게인 대역폭은 최소 RHPZ 주파수보다 낮아(일반적으로 5~10의 인수)야 한다. 더 낮은 대역폭이 필요한 경우 RHPZ를 무시할 수 있으며 식 3의 He(s)가 될 수 있다. 이 설계는 세라믹 출력 커패시터를 이용하기 때문에 ESR 영점 역시 무시할 수 있다. 이제 제어 식을 다음과 같이 간소화할 수 있다.
식 3과 5를 수정하고, gM = 1/RSENSE에서 RSENSE 대신 gM(A/V의 출력-전류 게인까지 보정)을 이용한다.
네거티브 부스트 레귤레이터 설계
순방향 전송 기능은 식 5에서 설명한 바와 같이 단극 시스템으로 간소화되었다. 실제 제어 루프 예시는 TI의 TPS540
20EVM082, VIN = -2.0 V, VOUT = -3.0 V, IOUT = A를 이용한 설계를 기반으로 한다. 이러한 전기 설계는 EVM 설계와 동일한 부품을 이용해 그림 3의 회로와 일관된 네거티브 부스트 레귤레이터로 구성될 수 있다. ‘입력’과 ‘출력’이라는 용어는 부스트 모드 입력 및 출력을 의미한다. 최소 RHPZ를 32 kHz로 계산하여 식 4를 이용할 수 있다. 제어 루프 설계의 목표는 1.0 kHz에서 단위 게인 크로스오버를 갖도록 하는 것이기 때문에 ESR 영점과 RHPZ 모두의 영향을 무시해도 된다.
표 1은 몇몇 특정 매개변수와 값을 포함한다. 식 6은 이 값을 이용해 순방향 전송 기능을 설명한다.
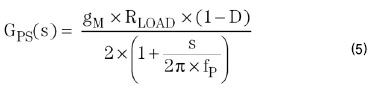
다른 부하-저항 값에 대한 GPS의 보드 플롯은 그림 5에 나타낸다. 극 위치와 저주파수 게인은 부하 저항과 함수 관계에 있음에 유의한다. 또한 게인 슬로프는 극 이후(COUT에 의해 구동된)에 변하지 않음을 유의한다. 극 이전에 게인은 부하에 의존하며 최대 부하에서 가장 높은 주파수 극을 갖는다(최소 RLOAD). 0.5Ω 부하(ILOAD = 6.0 A)는 4.4 kHz에서의 극을 초래한다. 또한 RHPZ가 게인을 증가하고 위상을 감소시킴을 알 수 있다. 이로 인해 보정이 불가능하며 RHPZ 효과가 감소되기 전에 크로스오버가 발생할 것을 요구한다.
이 설계를 위한 계획은 1.0 kHz에서의 개방 루프 전송 기능에서 단위 게인을 갖는 것이다. 플랜트는 1.0 kHz에서 대략 +9 dB의 게인을 갖는다. 이러한 순방향 전송 기능은 가장 높은 GPS 극 주파수에서 영점 이후의 적분기와 1.0 kHz (+9 dB + -9 dB = 0 dB)의 원하는 크로스오버에서 약 -9 dB를 초래하는 전체 게인으로 쉽게 보정될 수 있다. 이러한 보정은 크로스오버를 통해 단극 롤오프(rolloff) 특성에 가깝게 충분한 페이즈 여유를 만든다.
보드 안정성 기준
네거티브 피드백을 가진 폐쇄 루프 시스템은 식 7과 같은 전송 기능을 갖는다:

여기에서 G(s)는 순방향(플랜트) 전송 기능이며 H(s)는 네거티브 피드백 제어이다. G(s)H(s)는 개방 루프 전송 기능이다. 보드 안정성 기준은 G(s)H(s) = -1인 경우를 제외하고 Y(s)가 합당함을 나타낸다. 후자의 경우 Y(s)는 무한대이며 불안정하다. 둘은 불안정성이 발생하는 동안 동시에 발생해야 한다. 첫 번째, |G(s)H(s)|는 1 (게인 = 0 dB)이 되어야 한다. 두 번째, G(s)H(s) 페이즈는 -180 °가 되어야 하며, -1에 해당해야 한다. 페이즈 여백과 게인 여백을 포함한 보드 플롯은 이 조건 가까이에서 제어 설계가 접근하는 방식을 평가하는 데 사용된다. 페이즈 여백은 게인이 0 dB일 때 G(s)H(s)와 -180 °간 페이즈 차이로 정의되며, 게인 여백은 페이즈가 -180 °일 때 네거티브 게인을 의미한다. 45 °를 초과하는 페이즈 여백은 일반적으로 전원 공급 설계에서 우수한 수준으로 고려된다.
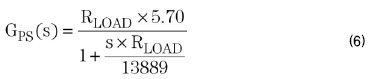
오류 증폭기(error-amplifier) 보정
오류 증폭기는 그림 6에 나타내고 있다. 회로의 전송 기능은 다음과 같다.

트랜스컨덕턴스(transconductance) 오류 증폭기의 전송 기능은 피드백-디바이더 게인을 포함한다. 전압-피드백 오류 증폭기인 경우 디바이더는 게인 조건이 되지 않는다. 식 8을 검토하면 GEA(s)가 0 Hz에서 극을 가지고, 다음에서 영점을 보정하며

아래 식에서 고주파수 극을 가짐을 알 수 있다:
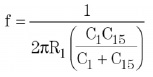
영점 및 극을 10 이상으로 분리하는 경우 C15 >> C1임을 유의한다. 목표는 게인을 1.0 kHz에서 -9 dB로 설정하고 가장 높은 GPS 극(4.4 kHz)에 영점을 배치하여 플랜트에서의 극을 보정하고 일부 고주파수에 추가 극을 배치하는 것이다.
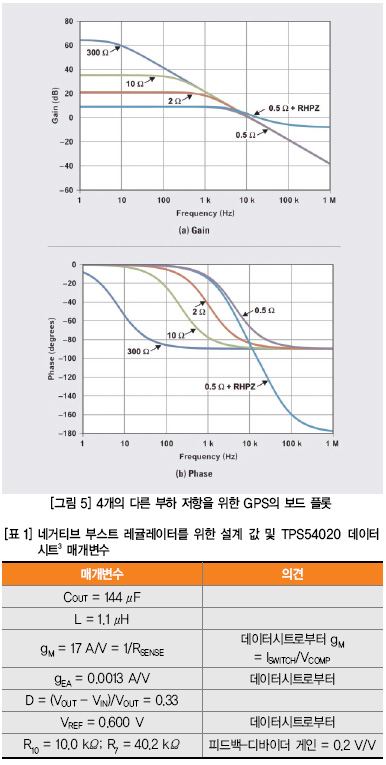
f = 1.0 kHz에서 |GEA(s)|를 평가하고 -9 dB로 설정하면 C1 + C15 쩁 C15 = 0.117 μF가 된다. 가장 가까운 표준 값으로 0.10 μF를 선택한다. C15와 4.4 kHz의 원하는 영점 위치를 고려하여 R1을 360 Ω로 계산할 수 있다. 가장 가까운 표준 값 357 Ω을 선택한다. 고주파수 극을 50 kHz에 배치한다. 이는 다소 임시적이지만, 이 극은 루프 위상 여백을 저하시키지 않도록 보장하기 위해 크로스오버 주파수의 10배 이상이 되어야 한다. 고주파수에서 루프 게인을 감소 상태로 유지하기 때문에 이 고주파수 극을 추가하는 것이 바람직하다. C1 은 0.01 μF로 계산된다. 그림 7은 컨버터의 최종 보정 루프의 보드 플롯을 보여준다. 예상하여 측정한 개방 루프 게인과 페이즈는 1.0 kHz 단위 게인 크로스오버와 근접하게 일치한다.
시험 데이터
그림 7은 0.5 Ω 부하 상태에서 전원 공급 장치의 측정된 보드 플롯을 포함한다. 1.0 kHz 크로스오버 근처에서 양호한 상관관계가 존재한다. 그림 7에서 예상한 파형은 RHPZ의 효과를 포함한다. 1.0 kHz와 10 kHz 사이의 게인과 페이즈 장애는 컨트롤러의 비선형 특성으로 인해 발생하는 것으로 간주되며, 부하 전류가 50% 이상인 경우에 나타나기 시작한다. 크로스오버를 초과한 경우에 발생하기 때문에 루프의 안정성에는 중요한 영향을 미치지 않는다.
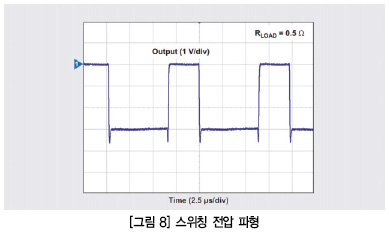
그림 8은 0.5 Ω(6 A) 부하 상태에서 스위칭 파형을 보여준다. 예상했듯이 벅 컨버터의 스위칭 파형과 동일하게 보이지만 접지 아래에서 프로그램된 -3.0 V의 VOUT에 따라 레벨이 전이된다.
추가 고려사항
이러한 유형의 컨버터는 추가적으로 세 가지 정도 고려할 사항이 있다. 첫 번째, TPS54020은 분리된 VIN 및 VDD를 가진다. 이를 통해 저전압(이 경우 2 V)에서 변환될 수 있으며 대부분의 다른 컨버터에서는 불가능 하다. 두 번째, 네거티브 부스트 설계 개념은 더 높은 전압으로 확장 가능하며, 선택한 컨버터의 정격에 의해서만 제한된다. 가장 중요한 세 번째, 부스트 컨버터가 시작하고 PVIN 핀에 전압이 가해진 후 부스트 출력의 부하 전류는 하단 FET의 바디 다이오드(body diode)를 통해 유도된다. TPS54020이 적절하게 기능함에도 불구하고 DC 전류로 시동할 경우 모든 기기가 동일한 방식으로 수행되는 것은 아니다. 따라서 하단 내부 FET와 병렬도 쇼트키 다이오드를 추가해 이러한 전류를 위한 외부 경로를 제공해야 할 수도 있다.
결론
본고에서는 네거티브 부스트 레귤레이터를 실행하고 우수한 성능을 얻기 위해 포지티브 벅 레귤레이터를 사용할 수 있음을 입증했다. 실제 성능은 실시간 측정과 제어 루프의 보드 플롯 모두에서 예상한 수치에 매우 근접해있다.
참고문헌
1. 제프 팔린(Jeff Falin), 타하르 알라그(Tahar Allag), 벤 호프(Ben Hopf), "전류 모드 제어 부스트 컨버터 보정" 애플리케이션 보고서 다운로드
2. “우반면 영점에 대한 간략한 설명” 다운로드
3. “소형 10A, 4.5V ~ 17V 입력, 경부하 효율을 갖는 SWIFT™ 동기식 스텝다운 컨버터” TPS54020 데이터시트 다운로드
4. “TPS54020EVM-082 평가 모듈(PWR082),” 사용자 가이드 다운로드
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>



