.jpg)
인터뷰 박찬훈 실장(한국기계연구원 로봇메카트로닉스 연구실)
인더스트리 4.0, 스마트 공장 등에 대한 관심이 높아지면서 물류 및 장비 관리와 함께 공정의 자동화에도 관심이 높아지고 있다. 대한민국 최초로 6자유도 산업로봇을 개발했던 한국기계연구원은 개원이래 산업로봇에 대한 연구를 이어오고 있다. 최근 공정 과정에서 물체를 고정하지 않고 작업하는 지그리스(jigless)작업에 대한 중요도가 높아지면서 이를 가능케하는 양팔형 산업로봇인 ‘아미로’(박스기사 참조)를 개발하는 등 협동로봇 기술연구에 앞장서고 있다.
최종적인 목표는 사람과 함께 일하며 사람과 똑같은 작업을 할 수 있는 로봇을 개발하는 것이다. 국내 산업용 협동로봇 기술 연구를 선도하고 있는 한국기계연구원 로봇메카트로닉스 연구실의 박찬훈 연구실장을 만나 연구실의 대표 성과와 기술수준, 국내 산업용 협동로봇에 대한 전망을 들었다.
Q. 한국기계연구원의 로봇메카트로닉스 연구실에 대한 간단한 소개 부탁드립니다.
A. 이름에서 볼 수 있는 것처럼 로봇을 연구하는 연구실입니다. 로봇연구는 사실 연구의 범위가 굉장히 넓습니다. 저희 연구실은 주로 하드웨어에 포커싱이 많이 되어있습니다. 여기서 하드웨어는 기계적인 하드웨어만을 말하는 것은 아니라 인공지능 분야를 제외한 전체 분야를 말합니다. 그중에서도 로봇의 팔, 손, 그리퍼, 센서 등을 연구하고 있습니다.
구체적으로 말하면 사람과 함께, 사람처럼 작업을 할 수 있는 로봇을 만드는데 포커싱을 맞추고 있습니다. 전통적인 아주 단순한 범주의 일만 하는 로봇의 범주를 벗어난 차세대 로봇 범주에 포함되는 것들이 있는데, 그중 사람하고 팀을 이루어서 작용하는 협동로봇을 연구합니다. 전통적인 산업로봇은 산업현장에서 기업들이 이미 잘하고 있습니다. 협동로봇을 구현하기 위한 안전기술, 로봇과 작업자 사이에 간단한 의사소통 가능하게 하는 기술 등이 필요할 것입니다. 이에 해당하는 기술들도 연구하고 있습니다.
Q. 대표적인 연구 성과로 산업용 양팔로봇 ‘아미로’가 있는데요, 아미로는 어떤 로봇입니까?
A. 아미로를 설명하기에 앞서 로봇의 분류에 대한 설명이 먼저 필요할 것 같습니다. 흔히 혼동을 많이 하는 부분이 로봇의 분류입니다. 형태를 기준으로 분류해보면 싱글암 로봇과 듀얼암 로봇이 있습니다. 로봇이 사용되는 환경측면에서 봤을 때는 전통적 산업로봇과 협동로봇이 있습니다.
여기서 말하는 전통적인 산업로봇은 격리된 상태에서만 사용가능한 로봇을 말하고, 협동로봇은 펜스에 의해서 격리되지 않은 상태에서도 작업자와 같이 사용할 수 있는 로봇입니다. 기능의 관점에서 나누면 픽앤플레이스 로봇과 조립로봇이 있습니다. 양팔로봇이더라고 픽앤플레이스만 하는 로봇일 수 있는 것이고, 싱글암 로봇인데 조립이 가능한 로봇도 있는 것입니다.
저희 연구실은 한팔보단 양팔 로봇을 연구하고 있고, 격리로봇보다는 협동로봇을, 픽앤플레이스보단 조립로봇을 연구하고 있습니다. 즉, 아미로는 한마디로 ‘양팔형 협동 조립로봇’이라고 할 수 있습니다. 형태상으로는 양팔이 특징이고, 배치되는 환경으로 보면 협동로봇이며, 조립 작업이 가능합니다. 물론 이것이 완성단계에 있다고 볼 순 없습니다. 양팔로봇의 관점에서는 구동계 성능을 더 높이기 위해서 노력하고 있고, 협동로봇 관점에서는 안전 성능을 좀 더 높이기 위해서 노력하고 있습니다. 조립로봇 관점에서는 단순한 그리퍼를 넘어 핸드까지 가면서 조립 능력을 올리기 위해 노력하고 있습니다.
.jpg)
Q. 하나의 로봇팔만을 가지고 있던 기존의 산업용 로봇팔에 비해 어떤 점이 더 우수한가요?
A. 기존보다 우수한 점을 보자면 싱글암 로봇은 지그리스(Jigless) 작업을 못합니다. 반드시 작업하려는 물체가 고정되어 있어야 한 팔로 작업이 가능하겠죠. 예를 들어 책을 상자에 꽂아 넣는 작업을 한다고 하면 책을 넣을 상자는 최소한 고정이 되어 있어야 로봇팔이 책을 넣을 수 있습니다. 그러나 양팔이면 고정되어 있지 않은 상태라도 한 팔로 트레이를 잡고, 다른 한 팔로는 책을 집어서 꽂을 수 있습니다.
또한 기존의 양팔로봇 대비해서는 양팔이 서로 협조해서 작업할 수 있도록 소프트웨어가 완성되어 있습니다. 통상적으로 양팔로봇을 만들더라도 한 팔로봇 두 개를 합쳐서 만드는 경우가 많이 있습니다. 저희는 시작부터 양팔로 만들고 양팔을 한꺼번에 제어할 수 있는 제어기를 만들었습니다. 그렇기 때문에 오른쪽팔과 왼쪽팔이 서로 긴밀하게 협조하면서 작업하는 게 가능합니다. 작업을 지시할때도 양팔을 각각 만들어 합친 경우는 각각의 팔에 명령을 내려 최종적으로 맞는 동작이 되게 해야 하는 복잡함과 어려움이 있습니다.
그러나 저희는 왼쪽팔의 관점에서 오른쪽팔이 어떻게 움직여야 하는지 결정해줍니다. 오른손과 왼손이 하는 일을 상대적으로 가르치기 때문에 로봇이 알아서 작업을 완수하는 것입니다. 로봇이 어떻게 움직여야 하느냐에 대한 명령을 주지 않고, 로봇이 핸들링해야 하는 물체에 대한 명령을 주기 때문에 로봇은 자신의 관절과 한계를 벗어나지 않도록 알아서 움직입니다.
또한 쉽게 티칭할 수 있도록 직접교시 기능을 탑재했고, 안전을 위한 소프트웨어나 충돌감지 센서 등을 탑재했습니다. 공동공간에서 작업할 수 있는 안전한 로봇입니다. 나아가 로봇의 온몸에 감각을 전하기 위한 피부기술을 연구하고 있습니다. 기존보다 훨씬 정교한 작업을 수행할 수 있도록 핸드연구도 별도로 진행하고 있습니다. 그렇게 되면 하드웨어의 기능 측면에서는 아마 가장 우수한 형태가 되지 않을까 생각합니다.
Q. 2017년에 발표된 대한민국 로봇산업 기술로드맵에서 선정한 로봇 8대 핵심 기술에도 제조로봇 분과가 선정되었고, 해당 분과의 분과장을 맡고 계신 것으로 알고 있습니다. 로드맵의 핵심 목표로는 저가격화, 안전기술, 조립 기술의 확보가 있었는데요, 아미로가 바로 작업자의 조립능력에 도전하는 조립 기술에 해당하는 결과물로 보여집니다.
그렇다면 로드맵에서 목표로 한 안전기술에 대한 부분은 어떻게 진행되고 있습니까?
A. 안전기술은 비접촉식과 접촉식 두 가지가 있는데, 비접촉식 안전은 말그대로 로봇에 닿기전에 닿을 것을 예상하는 기술입니다. 접촉식 기술은 로봇에 직접 닿았을 때 알게 되는 것입니다. 접촉기술은 다시 두 가지로 나뉘는데 하나는 로봇 내부에다 특별한 센서를 집어 넣어서 충돌을 방지하는 방법이 있고, 센서 없이 모터의 전기신호를 보고 충돌을 막는 방법이 있습니다. 연구를 해보니 특별한 센서를 집어넣어서 안전을 달성하는 것은 센서의 내구성, 가격, 전체 시스템의 복잡성 등의 문제가 생깁니다.
좋은 점 보다는 안 좋은 점이 더 컸습니다. 물론 그 방향으로 연구하면서 보완하시는 분들도 있지만 저희가 판단하기에 그것보단 센서를 쓰지않고 모터의 전류치와 신호를 가지고 충돌을 감지해내는 방법이 더 효율적이라 생각해 이에 대한 연구를 진행 중입니다. 이 방식들은 축토크 센서를 사용하는 것만큼 민감하진 않지만 유사한 수준까지는 도달했다고 보고 있습니다. 그런데 이 방식으로 충분하지 않습니다.
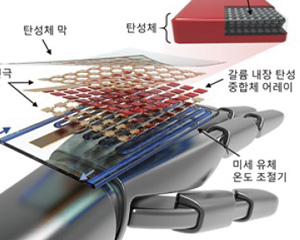
그래서 센서리스처럼 구조적으로도 단순하면서 기존 축토크 센서 보다 감지능력이 좋은 것을 찾게 됐고 그 결과가 앞서 말씀드렸던 피부입니다. 이 커버방식의 피부 기술은 로봇의 설계에 영향을 미치지 않습니다. 저희가 만드는 커버방식은 온몸이 센서로 뒤덮히기 때문에 민감도도 월등하게 높고 구조도 월등하게 간단한데 성능은 훨씬 좋습니다.
Q. 저가격화에 대한 부분은 달성하는데 상당히 어려움이 많을 것으로 예상됩니다.
저가격화는 굉장히 어려운 문제입니다. 왜냐하면 저가격화를 잘못 접근하는 사람들이 많기 때문입니다.
“기존 로봇이 3천만 원이라고 하면, 우리는 천만 원짜리 로봇을 만들 거야.”
여기까지는 좋습니다. 근데
“기존로봇은 쓸데없이 정밀도가 높아서 비싸. 우리는 정밀도를 낮춰서 가격을 낮출 거야” 혹은 “비싼 일본산 부품을 써서 가격이 높으니 우리는 값싼 중국산 부품을 써서 가격을 낮출 거야”
이건 누구나 할 수 있는 저가격화 접근방식입니다. 이것은 저가격화를 달성했다 하더라도 경쟁력을 갖춘게 아닙니다. 보다 싼 부품을 사용하면 당연히 보다 성능이 떨어지는 것입니다. 성능이 떨어지는 로봇에 대한 시장이 있다고들 주장하는데, 일본도 마찬가지로 싼부품으로 가격을 낮춰서 내놓으면 어차피 우리는 이기지 못할 것입니다. 그런 식으로 접근하는 저가격화는 말도 안 되는 것입니다.
저가격화라고 한다면 로봇에 들어가는 비싼 부품을 대체하는 기술을 개발하는 방식이 있습니다. 예를 들면 대표적인 비싼 부품은 감속기가 있는데, 감속기를 쓰지 않는 로봇을 만드는 것입니다. 그러면 다른데는 없고 우리만 가지고 있는 기술이면서 감속기를 없애 로봇의 단가를 낮출수 있을 것입니다. 이런 방식으로 경쟁력을 가지면서 단가를 낮출 수 있습니다.
이런 맥락에서 인공근육이라는 테마를 연구하고 있는데 이는 굉장히 가벼운 구동기를 말합니다. 모터베이스가 아닌 형상기억합금에 열을 가하면 수축하거나 팽창하는 방식으로 움직이는 구동기를 만드는 방식입니다. 아직 연구가 굉장히 초창기어서 지금 홍보를 하기엔 어려움이 있습니다. 이처럼 완전히 개념이 다른 구동기를 가지고 굉장히 싼 로봇을 만드는 방식으로 접근하고 있습니다. 기존 방식과 다른 형태의 구동기를 찾고 있는 것입니다.
또 하나, 기존의 싼 로봇들을 채용해 조립할 수 있도록 하는 디바이스를 만들어서 전체 시스템의 저가격화를 도모하는 51방법이 있습니다. 로봇이 조립 기능을 수행하려면 특수한 형태가 필요하기 때문에 가격이 비싸집니다. 그런데 앞서 말씀드린 것처럼 기존 로봇에 적용할 수 있는 특수한 그리퍼 등을 만들어서 똑같은 조립작업을 가능하게 만들어 상대적으로 가격을 저렴하게 만드는 방식으로 접근하고 있습니다.
.jpg)
Q. 로봇을 만들어도 핵심부품은 외산을 다 써야하는 경우가 생기는데 연구원이나 정부에서는 어떤 생각을 갖고 있습니까
A. 정부에서도 이 부분에 대한 고민이 있습니다. 그런데 개인적으로 우리가 만든 센서를 가지고 다 만들었으면 좋겠다는 접근이 맞는건지는 모르겠습니다. 우리나라의 로봇 경쟁력을 높여야 하는데 잘 안되니까 애먼 데서 원인을 찾는 게 아닌가하는 생각이 듭니다. 국산화 부품이 없어서 잘 안 되는 것이라 생각하시는 분들이 많은데 저는 그렇게 생각하지 않습니다.
일본의 하모닉 감속기 기업이 일본기업에는 무조건 싸게 팔고, 한국기업에는 무조건 비싸게 팔까요? 그렇지 않습니다. 그저 많이 구매하는 기업에게 싸게 주는 것입니다. 일본이 로봇을 만드는데 드는 단가가 우리나라 기업이 만드는데 드는 단가의 절반밖에 안될 것입니다. 이유는 딱 하나입니다. 한 번에 많이 사는 것입니다. 한번 주문을 낼 때 만개씩 내는 것입니다. 그러면 하모닉 감속기 생산 기업은 대량 주문한 일본기업의 생산 일정에 맞춰 생산라인을 잡습니다. 당연히 싸게 받을 수밖에 없습니다. 그런데 우리나라의 작은 기업이 구매를 하려고 하면 그 일정 사이사이에 껴서 생산할 수밖에 없겠죠. 당연히 비싸지는 것입니다.
"일본의 하모닉 감속기 기업이 일본기업에는 무조건 싸게 팔고,
한국기업에는 무조건 비싸게 팔까요? 그렇지 않습니다.
그저 많이 구매하는 기업에게 싸게 주는 것입니다."
Q. 그렇다면 국내 부품 업체에 대한 지원은 큰 의미가 없습니까?
A. 당연히 우리나라에 하모닉 감속기 만드는 업체가 있다면 좋죠. 부품기술의 자립화 차원에서 우리나라 부품기업을 육성하는 것은 반드시 필요합니다. 그리고 그 기업이 국가적 경쟁력을 갖추는 것은 분명 굉장히 중요한 일입니다. 그러나 그런 기업이 없어서 우리가 경쟁력 없는 로봇이 나오는 것은 결단코 아니라고 생각합니다.
전통적인 산업로봇은 가격에 의해서 시장경쟁력이 결정되는 필드이기 때문에 더 이상 정부에서 지원하는게 별로 바람직해 보이지 않습니다. 결국은 기술이 가격을 결정하는 곳으로 가야하는데 그게 제가 보기엔 협동로봇입니다.
전 세계적인 시장의 흐름이 그렇듯 대세는 협동로봇으로 갈 것입니다. 그러나 우리나라 기업들은 협동로봇에서 충분한 경쟁력을 갖고 있지 못합니다. 정부에서 협동로봇 분야에 계속해서 투자를 했으면 합니다.
Q. 산업현장에서 로봇의 필요성은 모두가 공감하고 있지만, 자동화로 인한 일자리의 감소를 우려하는 목소리가 항상 있습니다. 특히 우리나라는 일자리 감소 문제에 대해 민감한데요, 이런 요소들이 연구에 제한이 되지는 않습니까?
A. 이런 요소들이 연구에 영향을 미칠 수 있습니다. 많은 분들이 조립 작업 로봇을 만들고 수작업을 자동화 할 수 있다고 말하면 “그럼 일자리가 줄어드는 것 아닌가요”라고 말씀하십니다.
이 부분에 대해서는 공작기계에 대한 사례로 답할 수 있을 것 같습니다. 옛날에는 공작기계들이 다 선반이었습니다. 기능공 여러사람이 손으로 직접 해야하는 작업들이 많이 있었습니다. 그런데 어느날 완전히 자동화된 NC공작기계가 등장했습니다. 옛날엔 여러사람이 필요했던 작업이 한사람도 필요 없게 돼버렸죠. 그 당시에도 ‘기능공들은 일자리 다 잃겠다’라는 우려가 나왔습니다. 그러나 예전 수작업 시절의 시장을 10이라고 가정한다면, NC공작 기계가 나오면서 시장은 1,000으로 커졌습니다. 산업이 급격하게 성장한 것이죠.
물론 처음에는 NC공작기계를 다룰 수 있는 사람만 취직하고 기능공들은 일자리를 잃었습니다. 그러나 NC 공작기계가 보편화되면서 기존 기능공들은 재교육을 받고 NC공작기계를 다룰 수 있는 인력들로 전환됐습니다. 물론 이에 적응하지 못하고 도태된 사람도 일부 있었죠. 그러나 전체적인 일자리 측면에서 보면 훨씬 늘었습니다. 로봇 산업도 마찬가지 일 것입니다. 공정에서는 당연히 일자리가 줄어드는 게 맞습니다.
그러나 그 작업을 자동화시킴으로써 생산하는 공정의 파이가 커지거나 로봇에 대한 파이가 커지면서 결국은 그 산업에서 필요로 하는 인력이 훨씬 늘어나게 되는 겁니다. 이를 장기적으로 보지 않고 당장 로봇 하나 때문에 한사람이 빠진다고 생각하는 것은 일자리가 줄어든 것이라고 할 수 있겠지만, 그게 맞는 계산법이라고 할 수는 없는 것입니다.
"공정에서는 당연히 일자리가 줄어드는 게 맞습니다.
그러나 그 작업을 자동화시킴으로써 생산하는 공정의 파이가 커지거나
로봇에 대한 파이가 커지면서 결국은 그 산업에서
필요로 하는 인력이 훨씬 늘어나게 되는 겁니다."
Q. 오랜기간 연구개발을 통해 완성된 아미로지만 보완할 부분도 있을 것으로 생각됩니다. 개선방향 등 로봇메카트로닉스 연구실의 향후 연구개발 방향이 궁금합니다.
A. 장기적으로는 인간과 동일한 관절구조에 동일한 감각을 가지는 핸드를 연구하고 있습니다. 특화된 조립에 적용할 수 있는 그리퍼들을 개발 중입니다. 어떤 로봇이든 저희의 그리퍼만 부착하면 조립기능을 가질 수 있도록 연구 중입니다. 또한 기존로봇들을 협동로봇으로 바꿀 수 있는 피부기술을 개발중입니다. 피부기술은 비단 아미로에게만 적용되는 것은 아니라 어떤 로봇이든 다 적용할 수 있습니다.
또한 트렌드가 지능에 대한 부분이 워낙 강조되고 있어 신규 연구인력은 전부 지능인력들을 요청한 상태입니다. 저희가 만든 하드웨어에다가 인간처럼 판단하고 작업할 수 있는 지능을 탑재할 계획입니다. 저희가 판단하기에 지능 파트를 제외한 부분은 기술이 이미 어느 정도 궤도에 올랐다고 보고있습니다. 계속 강한분야를 충원하기 보다는 저희가 갖추고 있지 못한 분야를 계속해서 충원해나가고 있습니다.
Q. 로봇메카트로닉스 연구실의 목표와 비전은 무엇입니까?
A. 저희의 성과차원에서의 목표라고 한다면, 사람과 동등한 수준의 작업이 가능한 로봇을 완성하는 것이 저희의 최종적인 목표라고 할 수 있습니다. 그것이 어찌 보면 비전이라고 할 수 있다. 그 뿐 아니라 그렇게 완성된 로봇이 사람과 팀을 이뤄같이 일하길 원합니다.
‘사람과 로봇이 공존하는 미래에 필요한 로봇의 핵심기술을 확보하는 것’이 저희 연구실의 비전입니다. 그런데 하다 보니 단순히 하드웨어적인 성능이나 제어적인 관점에서의 접근만 가지고는 이뤄지지 않는 부분이 많습니다. 사람처럼은 아니지만 사람과 유사한 판단시퀀스를 필요로 하는 경우가 많아서 향후에는 지능에 관련된 인력들을 집중적으로 보강해서 말씀드린 비전에 도달할 수 있도록 노력할 것입니다.
.jpg)
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>