머신러닝 프로젝트, 똑똑한 왕자(SmartPrince) 만들기 3
.jpg)
프로젝트 과정 목차
1. 인공지능(AI)이란 무엇인가?
2. 전원 배터리모듈 개발과정 및 기능
3. 센서제어 모듈 개발과정 및 기능
4. 모터제어 모듈 개발과정 및 기능
5. 카메라 영상 움직임 추적 모듈 개발과정 및 기능
6. 음성처리 모듈 개발과정 및 기능
7. 병렬처리 모듈 개발과정 및 기능
8. 머신러닝 기능 개발과정 및 기능
똑똑한 왕자(SmartPrince) 소개
커널연구회에서 지능형로봇 만들기로 진행하는 SmartPrince(똑똑한 왕자) 시리즈는 커널연구회에서 제작한 9개의 모듈들에 머신러닝 알고리즘을 탑재하는 오픈플랫폼, 오픈소스 프로젝트이다. 각각의 모듈들은 독립된 형태로 동작할 수도 있고, 라즈베리파이 및 아두이노 호환 핀맵에 모듈들을 적층으로 쌓아서 한꺼번에 병렬로 동작시킬 수도 있다. 모듈에 있는 USB에 시리얼통신 명령어(AT Command)를 전송하여 모듈들을 제어한다.
SmartSensor(센서제어) 모듈
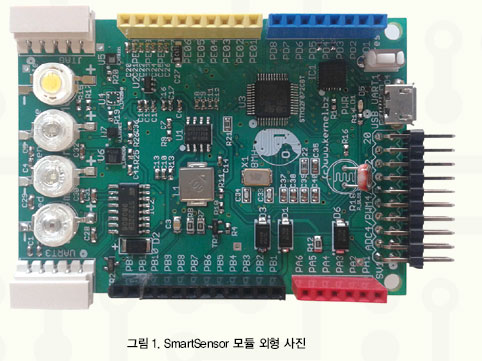
커널연구회에서 설계하여 제작한 SmartSensor 모듈의 외형은 아래 사진과 같다. 이 모듈의 모델명은 B05_SmartSensor이다. 이 보드는 SmartPower 모듈에서 라즈베리파이 40핀 I/O핀에 장착할 수 있고, 아두이노 헤더핀과도 호환된다. Cortex-M0(STM32F0) MCU가 내장되어 있어 모듈 독립적으로 센서들로부터 데이터를 수집할 수 있다.
SmartSensor에서 수집하고 있는 센서 데이터들은 다음과 같다.
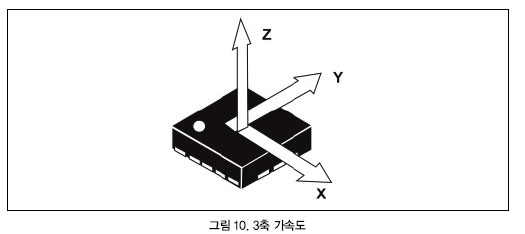
- Accelerometer 센서: 3축(X, Y, Z축) 방향별로 이동속도 데이터를 수집할 수 있다.
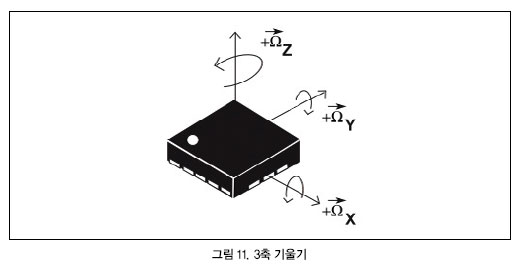
- Gyroscope 센서: 3축(X, Y, Z축) 방향별로 기울기 데이터를 수집할 수 있다.
- Magnetic 센서: 3축(X, Y, Z축) 방향별로 지구 자기장(나침반) 데이터를 수집할 수 있다.
- 온도, 습도, 조도 센서: 온도, 습도, 빛의 밝기 데이터를 수집할 수 있다.
- ADC 센서: 각종 ADC 센서(초음파, 적외선)를 연결하여 데이터를 수집할 수 있다.
SmartSensor 모듈에 있는 마이크로 USB 포트를 PC에 연결하고 PC에서 시리얼통신 터미널을 실행하여 AT 명령어로 센서 데이터를 쉽게 수집할 수 있다. 또한 라즈베리파이와 아두이노와 결합하여 이동형 로봇의 센서 모듈로 사용할 수도 있다. 좀더 자세한 내용들은 아래부터 설명된다.
하드웨어 제원 및 기능
먼저, B05_SmartSensor의 하드웨어 제원 및 기능에 대해서 알아보도록 하자. 그림 2는 이 모듈의 제원을 부품 위치별로 설명하는 것이다.
.jpg)
B05_SmartSensor 모듈 제원 및 기능 요약
- 보드 크기는 가로 53mm, 세로 75mm(아두이노 헤더핀 호환)
- Cortex-M0(STM32F0) MCU 내장
- 센서(3축 속도, 기울기, 방향), 온도, 습도, 조도 센서
- 외부 확장 헤더핀(20핀)을 제공하여 ADC 센서 4개, 외부 GPIO 4개 연결가능
- RS232 외부 시리얼 통신
- 고휘도 LED를 색상별(Red, Green, Blue, White) 내장
- 마이크로 USB 포트에 PC의 시리얼통신 터미널을 연결하여 AT 명령어로 동작 제어
핀맵 정보
SmartSensor는 아두이노 헤더핀과 호환된다. 아래의 핀맵 정보를 확인, 장치들과 연결하여 프로그래밍할 수 있다.
아두이노 호환 헤더핀
.jpg)
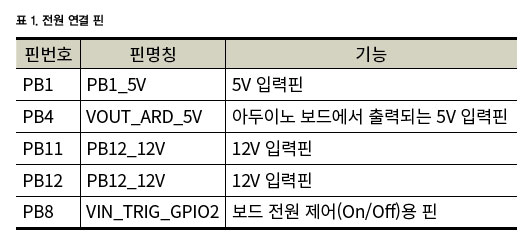
보드에 인가되는 전압은 5V, 12V 모두 사용 가능하다. 아두이노 보드를 통하여 5V만 입력해도 되고, SmartSensor 보드에 12V를 인가해도 된다. 배터리(리튬이온 18650타입) 전원은 3.7V를 2개 직렬로 연결하여 7.4V를 12V핀에 인가한다.
PB8(VIN_TRIG_GPIO2)핀은 SmartSensor 보드에 인가되는 전원을 차단하고자 할 때 사용한다. PB8에 Low 신호가 입력되면 SmartSensor 보드 전원이 차단된다.
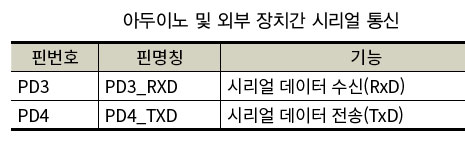
아두이노 및 외부 장치간에 시리얼, I2C, SPI 데이터 통신 및 인터럽트 처리는 아래의 핀번호를 참조하여 프로그래밍할 수 있다.
.jpg) 외부 연결 확장핀
외부 연결 확장핀
SmartSensor 보드의 하단부에 외부 확장핀(20핀: 2열 10핀)을 제공하여 ADC 센서 4개, 외부 GPIO 4개, RS232 시리얼 통신을 연결할 수 있다.
.jpg)
.jpg)
PC에 연결방법
???????
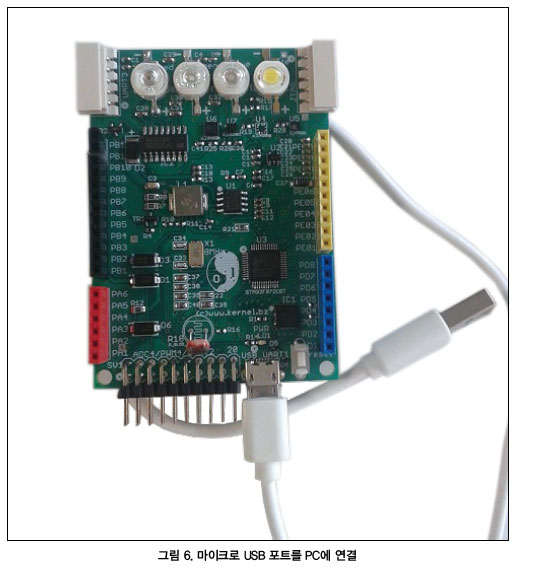
아래 사진처럼, SmartSensor 모듈에 있는 마이크로 USB 포트를 윈도우가 설치되어 있는 PC에 연결한다. USB 연결선을 PC에 장착만 하면, USB로부터 5V 전원이 공급되므로 SmartSensor 모듈 하나는 충분히 동작된다.
윈도우의 장치 관리자를 확인해 보면 아래와 같이 SmartSensor의 시리얼 장치가 자동 인식된다.
.jpg)
커널연구회는 SmartSensor 모듈에 USB 시리얼(UART) 장치로 Silicon Labs사의 CP2102 IC를 사용했다. 이 장치는 PC에 기본적으로 드라이버가 설치되어 있으므로 별도로 드라이버를 설치하지 않아도 자동으로 인식된다.
PC의 장치관리자에서 USB 시리얼(UART) 통신 장치의 포트 번호를 확인한다. 위의 그림에서는 COM4 포트이다(포트 번호는 PC마다 달라질 수 있다).
PC에서 시리얼 터미널 프로그램을 실행한다. 윈도우 시리얼 터미널이나 Putty, SecureCRT등 사용하기 편한 시리얼 터미널 프로그램을 실행하면 된다. 실행한 시리얼 터미널 프로그램의 시리얼 통신 설정(옵션) 메뉴에서 시리얼 옵션들을 다음과 같이 설정한다.
.jpg)
시리얼 Baud rate는 115200, Data bits는 8, Parity는 None, Stop bits는 1로 설정하고, Flow control은 모두 체크하지 않는다.
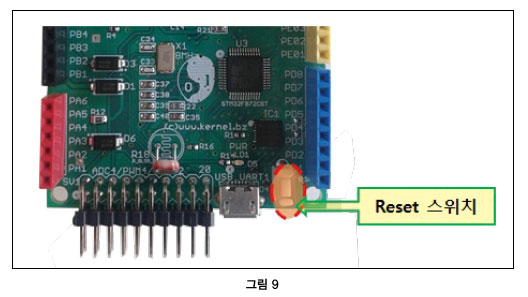
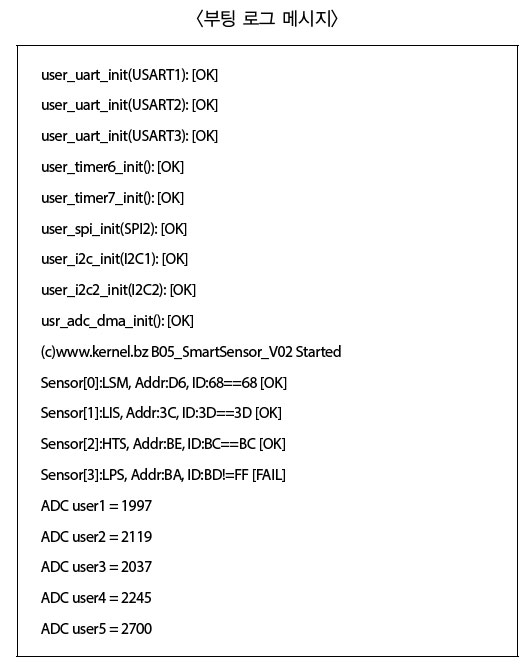
위와 같이 시리얼통신 옵션들을 설정한 후, SmartSensor 보드의 리셋 버튼을 한번 눌러주면 시리얼 터미널 화면에 아래와 같은 메시지들이 출력되면서 동작을 시작한다.
시리얼 터미널에 키보드로부터 AT? 라고 명령을 입력하면 다음과 같은 AT 명령어 사용법(도움말)이 출력된다. 이 명령어들의 자세한 사용법은 다음 절부터 자세히 설명한다.
.jpg)
AT 명령어 사용법에 대해서는 아래의 커널연구회 링크를 참조해 주기 바란다.
https://www.kernel.bz/blogPost/B05_SmartSensor
센서 데이터 가져오기
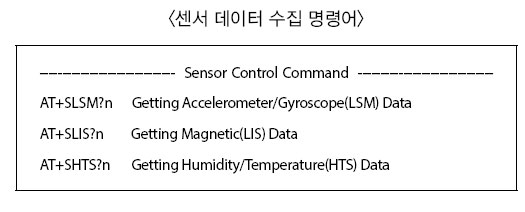
센서들의 데이터를 가져오는 AT 명령어는 다음과 같이 3가지 종류가 있다. 첫째로 AT+SLSM?n 명령어는 3축 가속도와 3축 기울기 데이터를 가져온다. 두 번째 AT+SLIS?n 명령어는 지구 자기장(지자계) 센서로부터 방향 정보를 가져온다. 세 번째 AT+SHTS?n 명령어는 온도와 습도 센서로부터 데이터를 가져온다.
먼저 AT+SLSM? 명령어를 시리얼 터미널에 입력하면 다음과 같은 데이터를 출력한다. AT+SLSM?n에서 n은 생략가능하다. 하지만 n에 숫자를 입력하면 그 숫자만큼 데이터를 반복 수집하여 평균값을 출력한다. 예를 들어 n에 6을 입력하면, 내부적으로 센서 데이터를 6번 반복 수집하여 합산한 후 6으로 나눈 평균값을 출력한다. 이렇게 하면 오차가 줄어든다.

위의 데이터는 SmartSensor 보드에 있는 3축 가속도와 3축 기울기 센서인 LSM6DS0 칩으로부터 데이터를 수집하여 출력한 것이다. acc_x는 X축 방향으로 이동할 때 발생하는 가속도 데이터이고, acc_y는 Y축 방향으로 이동할 때 발생하는 가속도 데이터이며, acc_z는 Z축 방향으로 이동할 때 발생하는 가속도 데이터이다. 그림 10은 이것을 설명하는 것이다.
roll은 X축을 기준으로 기울어진 기울기 데이터이고, pitch는 Y축 기준의 기울기 데이터이며, yaw는 Z축 기준의 기울기 데이터이다. 그림 11은 이것을 설명하는 것이다.
다음으로 AT+SLIS? 명령어를 시리얼 터미널에 입력하면 다음과 같은 데이터를 출력한다. AT+SLIS?n에서 n은 생략가능하다. n은 데이터를 내부적으로 반복 수집하는 횟수이다.
.jpg)
위의 데이터는 SmartSensor 보드에 있는 3축 지자계 센서인 LIS3MDL 칩으로부터 지구 자기장을 기준으로 이 칩이 놓여진 방향 데이터를 출력한 것이다. mag_x는 X축 기준의 방향 데이터이고, mag_y는 Y축 기준의 방향 데이터이며, mag_z는 Z축 기준의 방향 데이터이다. 그림 12는 이것을 설명하고 있는 것이다.
.jpg)
다음으로 AT+SHTS? 명령어를 시리얼 터미널에 입력하면 다음과 같은 데이터를 출력한다. AT+ SHTS?n에서 n은 생략가능하다. n은 데이터를 내부적으로 반복 수집하는 횟수이다.
.jpg)
위의 데이터는 SmartSensor 보드에 있는 온도 습도 센서인 HTS221 칩으로부터 온도와 습도 데이터를 가져와서 출력한 것이다.
temper는 온도 데이터이고 humty는 습도 데이터이다.
ADC 센서들의 데이터 가져오기
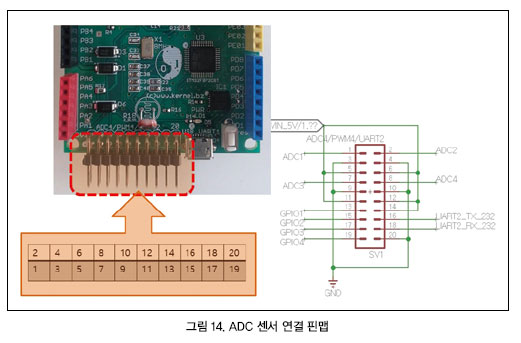
ADC 센서들은 아래 그림과 같이 SmartSensor 보드의 하단부에 있는 외부 확장 헤더핀(2열 40핀)에 연결할 수 있다. ADC 센서들의 데이터에 해당하는 ADC1, 2, 3, 4는 외부 확장 헤더핀번호 1, 2, 7, 8에 각각 연결하고 전원(5V)은 5, 6, 11, 12번 핀에 연결하고 0V 그라운드는 3, 4, 9, 10번 핀에 각각 연결하면 된다. 특별히 ADC5는 SmartSensor 보드에서 조도(빛의 밝기)센서에 연결되어 있다(내장).
ADC 센서들로부터 데이터를 가져오는 명령어는 다음과 같다.
AT+SADC?를 시리얼 터미널에 입력하면 다음과 같이 ADC 센서 번호별로 각각의 데이터가 출력된다. AT+SADC?n에서 n은 생략가능하다. n은 데이터를 내부적으로 반복 수집하는 횟수이다.

adc1은 ADC1 센서의 데이터, adc2은 ADC2 센서의 데이터, adc3은 ADC3 센서의 데이터, adc4은 ADC4 센서의 데이터이고 adc5은 ADC5 센서의 데이터이다. 특별히 adc5는 SmartSensor 보드에 내장되어 있는 조도센서 데이터 값이다. 이 값은 최소 0부터 최대 4095 사이에서 출력된다. 빛이 밝을수록 큰 값이 출력되고 빛이 어두워질수록 작은 값이 출력된다.
※ 기타 문의 사항은 이메일(
rgbi3307@nate.com)을 보내주시기 바랍니다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>