.jpg)
PDR의 기본적인 수학 공식과 다양한 구성 소자들을 설명하고, 실내 포지셔닝을 위해 위치 이용성 및 신뢰성을 향상시키는 솔루션을 사용한 PDR 테스트 결과를 제시한다.
머리말
상황 인식(contextual awareness) 기능에서 위치는 중요한 요소이다. 실내 환경에서 높은 신뢰도 수준으로 위치 정보를 사용할 수 있게 된다면 다양한 활용 사례가 가능하다. 바로 이를 실현하는 기술 중 하나가 보행자 추측 항법(Pedestrian Dead-Reckoning, PDR)이며, PDR을 통해 실내 환경에서 위치의 이용성과 신뢰성을 향상시킬 수 있다. PDR 과정에 필요한 관성 센서, 자기 센서, 압력 센서가 성능 면에서 크게 향상되고 전력 소모가 극히 낮아짐으로써, 이 센서들을 PDR 애플리케이션에 상시 동작(always-on) 모드로 사용할 수 있게 되었다.
이러한 발전의 결과로 어디에서나 위치 정보 이용이 가능한 세상을 구현하는 고품질 MEMS 센서와 고성능 PDR 알고리즘에 대한 수요가 매우 높아지고 있다. 이 글에서는 PDR의 기본적인 수학 공식과 다양한 구성 소자들을 설명하고, 실내 포지셔닝을 위해 위치 이용성 및 신뢰성을 향상시키는 솔루션을 사용한 PDR 테스트 결과를 제시한다.
포지셔닝 기술
GNSS(Global Navigation Satellite System) 리시버는 실외 내비게이션 솔루션에 널리 사용되고 있다. GNSS 리시버는 오늘날 거의 모든 스마트폰에 사용되고 있으며 내비게이션, POI(point-of-interest) 검색, 매핑 등 다양한 위치 기반 서비스를 가능하게 해준다. 사용자들은 자신의 디바이스가 어느 장소에서나 위치 정보를 제공하기를 바라며, 위성 신호가 쇼핑몰이나 공항 터미널의 벽이나 천장을 통과하지 못한다는 사실에 대해서는 대체로 관심이 없다. GNSS 위성 신호는 건축 자재로 인해 약화되기 때문에 고감도 리시버라 해도 실내에서는 정확한 위치를 제공하지 못한다.
이에 다양한 솔루션이 실내 포지셔닝용으로 개발되고 있으며, 이는 삼각측량 비콘으로 무선 트랜스미터를 사용해 리시버 위치를 계산한다. 이 솔루션들은 기존 실내 환경의 와이파이 AP(Access Points)를 이용해 위치를 계산할 수 있다. 또한 이와 유사하게 블루투스(Bluetooth) 트랜스미터, GSM, 기타 휴대전화 트랜스미터를 사용하거나 Nextnav와 같은 실내 포지셔닝 전용 비콘을 사용하는 솔루션도 있다. 이 기술들은 Assisted-GPS/GLONASS용 서버 인프라의 데이터, EE(Extended Ephemeris) 데이터, 와이파이 AP 포지셔닝 데이터를 결합해 준다.
각각의 기술은 실내 포지셔닝용으로서의 장단점을 가지고 있다. 또 다른 대안은 MEMS 센서(가속도 센서, 지자기 센서, 자이로스코프, 고도 센서)를 사용해 위치 계산을 하는 기술로서, 현재 스마트폰, 태블릿, 카메라, 피트니스 제품, 그 외 휴대용 컨수머 전자기기에 널리 활용되고 있다. 이러한 센서들에 PDR 기법을 사용하면 사용자 위치를 계산할 수 있다.
융합
다양한 소스에서 얻은 위치 정보는 포지셔닝 정확도 및 전력 예산 요건을 기반으로 컨트롤러를 통해 융합할 수 있다. 그런 다음 단일 위치 값과 함께 위치 불확실도를 애플리케이션에 제공할 수 있다. 융합 알고리즘은 각각의 위치 추정, 상관화 파라미터, 과거 측정을 위해 신뢰도 파라미터를 사용하면서 와이파이, 블루투스, PDR, GNSS와 같은 복합 기술로 얻은 정보에 가중치를 부여하는 데 중요한 역할을 한다.
실외의 경우, GNSS 리시버에서 도출되는 위치는 정확도가 높고 불확실도는 낮다. 와이파이 시스템으로 위치 추정을 할 경우, 컨트롤러가 위치 계산 시 사용자 가까이에 있는 AP로부터의 측정을 사용할 때 신호 강도가 강하고 정확도가 더 높다(그만큼 불확실도는 낮아진다). 와이파이 AP 데이터베이스(AP 위치 및 그 불확실도 포함)의 품질도 솔루션의 위치 정확도에 영향을 미친다.
PDR은 외부 지원이나 인프라를 전혀 필요로 하지 않으며, 정확한 상대적 위치 정보를 제공할 수 있다. 따라서 그 특성상 GNSS나 와이파이 기반 내비게이션 시스템과 같은 절대 포지셔닝 기술을 보완해준다. 그 결과, PDR은 실내 환경에서 더 높은 정확도, 이용성, 신뢰성을 갖추고 사용자 위치를 제공하는 하이브리드 시스템에 적합하다.
PDR(Pedestrian Dead-Reckoning)
모바일 디바이스에 일반적으로 사용되는 MEMS 센서는 센서 드리프트와 잡음에 영향을 받기 때문에 전통적인 INS 기계화에서 볼 수 있는 적분 기반 기법은 다루기 힘든 변위 및 자세 오차를 일으킨다. 전통적인 적분 기반 기법은 보행자 내비게이션에 있어 부실한 결과값을 제공하며, 이는 인간 동작과 관련된 복잡한 역동성의 조합을 모델링하고 컴퓨터 연산에 활용하기가 어렵기 때문이다. 하지만 지난 몇십 년간, 실내 환경에서의 보행자를 위해 기대할만한 내비게이션 결과값을 제공하는 두 가지 주요한 기법이 개발되었다.
바로 영속도 보정(Zero Velocity Update, ZUPT) 기반 INS-EKF-ZUPT(IEZ) 기법과 보폭 감지, 보폭 거리 추정, 방향 추정 알고리즘으로 이루어진 인간 보행 운동학 기반 기법이다. ZUPT 기반 기법은 관성 센서가 발에 탑재된다고 가정하고, 사람이 걸음을 내디딜 때마다 그 움직임이 일시 정지된다는 물리적 현상을 활용한 것이다. 이 글은 좀 더 일반적인 방식에 주목하고 있다.
일반화된 내비게이션 공식 2를 통해 PDR 프로세스의 수학적 공식을 도출할 수 있다. 이 공식을 두 번 적분하면 플랫폼 가속도에서 동쪽 및 북쪽 기준 프레임으로 표현된 위치로 바꿀 수 있으며, 이는 공식 1과 같다.
.jpg)
이 공식에서 s(t)는 변위이고, ψ(t)는 방향이다. 보행자 동작에서는 걸음을 내딛는 간격 동안 속도 및 방향이 일정하다고 간주한다. 구분적 선형 근사식을 적용하면 공식 1을 다음과 같이 계차 방정식으로 바꿀 수 있다.
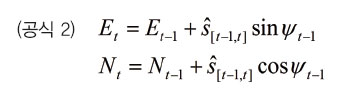
공식 2는 가속도와 각도 비율의 적분이 아니라 보행수 계수를 사용한 추측 항법(DR) 기법을 보여준다. 공식 2의 DR 프로세스는 세 요소로 이루어진다. 1) 시간 t-1에 최종적으로 알려진 사용자의 절대 위치(Et-1, Nt-1)(동, 북 좌표 프레임 사용), 2) t-1에서 (S^[t-1, t])까지의 보폭 거리, 3) 시간 t-1으로부터의 방향(ψ). 공식 2에서와 같이 최종적으로 알려진 위치(Et-1, Nt-1)에 대해 새로운 위치 좌표(Et, Nt)를 계산할 수 있다.
공식 2를 살펴보면 PDR 기법의 정확도는 두 가지 요소에 달려있다. 1) 보행 거리 계산과 2) 사용자 방향이다. PDR 기법에서 보행 거리는 사람이 걸을 때 감지되는 걸음마다 추정되는 보폭 거리를 누적해 계산할 수 있다. 하지만 전 세계 사용자에게 맞게 정확한 보폭 거리를 추정한다는 것은 쉽지 않은 과제이다. 이에 정확한 보폭 거리를 추정하기 위해 다양한 모델들이 개발되어 있다.
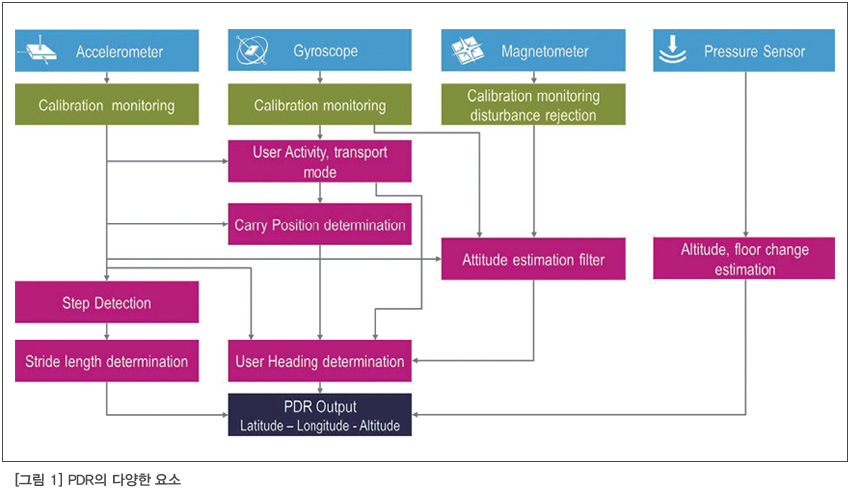
그림 1은 PDR의 다양한 요소를 블록 다이어그램으로 설명하고 있다. 관성 센서 데이터는 캘리브레이션 모니터링 로직을 통해 처리한다. 가속도 센서 및 자이로스코프 바이어스, 축척 계수의 추정치는 최대한 정확하게 유지한다. 지자기 센서 데이터는 캘리브레이션 모니터링 블록을 통해 처리해 강자성 및 연자성 파라미터를 계산한다. 또한 지자기 센서 데이터를 이용해 측정 데이터가 자기 교란(magnetic disturbance)을 나타내는지를 판단할 수 있다. 자기 캘리브레이션 모니터링 모듈은 캘리브레이션 파라미터가 자기 교란의 영향을 받지 않도록 설계된다.
보행 감지 알고리즘은 패턴 매칭을 사용해 인간의 걸음걸이 모델 특성과 대조한다. 디바이스를 신체 어느 위치(바지 주머니, 혁대, 셔츠 주머니 등)에 휴대하느냐에 따라 가속도 패턴이 달라진다. 휴대 위치 판별 모듈은 디바이스를 손에 들고 팔을 흔들기, 머리 가까이에 대기, 바지 및 셔츠 주머니에 넣기, 혁대에 차기와 같은 통상적인 활용 사례들에 대해 모듈 위치를 감지한다.
PDR 기법 공식에서 두 번째 조건은 사용자 방향이며, 이는 디바이스 방향과 사용자 보행 방향으로 이루어진다. 디바이스 방향은 나침반 측정으로 계산된 기울기 보정 출력을 통해 구할 수 있다. 하지만 외부 자기 교란이 나침반 성능에 영향을 미치기 때문에 순전히 나침반 측정에만 의존해 계산하면 안 된다. 이러한 이유로 자세(attitude) 필터로도 알려진 융합 필터를 통해 지자기 센서, 자이로스코프, 가속도 센서 데이터를 결합해야 한다. 이 자세 필터가 지구 기준 프레임에 비례하는 인체 프레임에서의 디바이스 방향을 계산한다.

디바이스 방향은 쿼터니언(quaternion)을 사용해 표현하는데, 이는 보다 컴팩트한 표현이며 쿼터니언은 오일러 각(Euler angle)이나 9 x 9 방향 행렬에 비해 수치적으로 안정적이기 때문이다. 자세 필터는 EKF(Extended Kalman Filter) 공식을 기반으로 하며, 이는 다양한 외부 자기장과 통상적인 활용 시나리오로 휴대할 때 디바이스의 동적 움직임을 반영하기 위해서이다. 방향이 전반적인 포지셔닝 정확도에 미치는 영향이 크므로 센서 확률 잡음, 바이어스 불안정성, 비선형성, 그 외 시스템 성능을 저하시킬 수 있는 요인들을 면밀하게 고려해야 한다.
저잡음 지자기 센서의 중요성
지자기 센서 캘리브레이션 파라미터(강자성 및 연자성)는 디바이스 사용 시 3D 공간에서 디바이스가 회전하는 것에 따라 다양한 센서 축이 지구 자기장 벡터에 노출될 때 수집되는 측정 데이터로 계산한다. 바이어스 추정치의 정확도는 지자기 센서 데이터의 잡음과 직접적으로 연관된다. 지자기 센서 잡음이 높으면 바이어스 추정치의 정확도가 떨어지고, 결국 방향 추정치에 영향을 미치게 된다. 바이어스 추정치의 오차는 위도가 높아질수록 커지며, 이는 지구 자기장의 수평 요소가 더 작아지기 때문이다. 보통의 수평 자기장 강도일 경우에도, 1μT의 바이어스 오차만으로 최대 5도의 방향 오차를 일으킬 수 있으며, 이는 PDR에 있어 상당히 큰 오차이다.
보행 각도 계산
자세 융합 필터는 신체 프레임에서 디바이스 방향을 계산한다. 하지만 그림 2에서 보듯 사용자가 디바이스를 임의로 어느 방향으로든 휴대할 수 있으므로, 자세 필터 방향이 곧 사용자 방향(또는 보행 방향)인 것은 아니다.
보행 각도 α는 보행 움직임의 생리학적 특성에 기반하고 가속도 파형의 순환적 특성 및 통계를 사용해 계산할 수 있다.
.jpg)
테스트 결과
ST의 가속도 센서+자이로스코프(LSM6DSM), 지자기 센서(LSM303AGR), 압력 센서(LPS22HB)를 STM32 마이크로컨트롤러로 연결해 PDR을 구현하였다. 센서, 마이크로컨트롤러, 블루투스 커넥티비티로 이루어진 이 하드웨어 레퍼런스 디자인이 센서타일(SensorTile)이다(이에 관한 자세한 내용은 홈페이지
www.ST.com에서 확인할 수 있다). PDR 궤적 출력은 모바일폰의 안드로이드 앱을 통해 실시간으로 표시된다. 6축 센서 LSM6DSM(가속도 센서+자이로스코프)는 정상 모드 작동 시 400A 미만을 소모한다.
이 센서의 자이로스코프는 정격 잡음 밀도가 3.8mdps /√Hz이다. 가속도 잡음 밀도는 90μg/√Hz이다. 지자기 센서는 RMS 잡음이 3mGauss이고 온도로 인해 바이어스 오프셋 드리프트를 전혀 일으키지 않으며, 이는 AMR 기술을 사용해 설계되었기 때문이다. 지자기 센서의 전류 소모는 고분해능 모드에서 200μA 미만이다. 압력 센서는 RMS 잡음이 0.0075hPA이고 온도로 인해 0.1hPa의 드리프트를 일으킨다. 센서들의 이와 같은 잡음 특성 및 바이어스 안정성을 견고한 고성능 PDR 알고리즘과 함께 활용하면 어느 장소에서든 위치 정보를 제공할 수 있다.
그림 3은 통상적인 활용 시나리오로 보행 테스트를 했을 때의 궤적을 보여준다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>