



Joy Lin | 매스웍스 항공우주 및 국방산업 마케팅 매니저
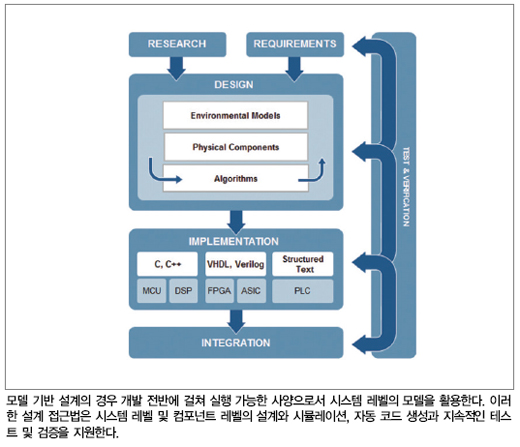
차세대 UAS(무인 항공 시스템)는 더욱 복잡할 뿐 아니라 잠재적으로 상충하는 여러 성능 및 안정성과 관련된 요구 사항들을 충족해야 한다. 이러한 문제 해결을 위해 엔지니어는 COT 도구를 활용한 시스템 수준에서의 설계 개발 및 최적화를 위해 모델 기반 설계를 채택하고 있다. MATLAB 및 Simulink의 모델 기반 설계는 다양한 분야의 엔지니어가 소프트웨어 내에서 설계를 구현하거나 하드웨어 프로토타입을 개발하기 전에, 시스템 레벨에서 설계를 최적화하고 높은 수준의 요구 사항을 검증하며 설계 상반관계 분석을 수행할 수 있도록 지원한다.
UAS란
차세대 UAS(무인 항공 시스템)는 더욱 복잡할 뿐 아니라 잠재적으로 상충하는 여러 성능 및 안정성과 관련된 요구 사항들을 충족해야 한다. 서브시스템 레벨의 최적화를 수행하는 레거시 설계 및 특정 도메인에만 적용 가능한 도구에 의존하는 기존 개발 방법은 이러한 복잡한 시스템의 시스템 레벨의 설계 최적화 수행을 어렵게 하거나 심지어는 불가능하게 하기도 한다.
이러한 문제 해결을 위해 엔지니어는 COT(commercial off-the-shelf) 도구를 활용한 시스템 수준에서의 설계 개발 및 최적화를 위해 모델 기반 설계를 채택하고 있다.
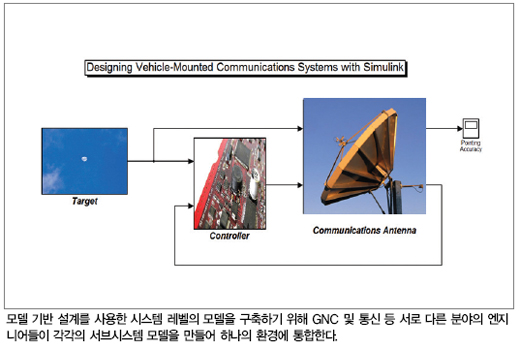
엔지니어는 모델 기반 설계를 통해 공유된 환경에서 멀티도메인 모델을 구축하고 개발 초기 단계에 GNC(guidance, navigation, and control) 및 통신과 같은 여러 분야의 서브시스템을 공통된 시스템 레벨의 모델에 통합할 수 있게 된다. 시스템 레벨의 모델을 통해 엔지니어는 설계 공간을 탐색함으로써 상반관계에 대한 연구를 수행하고 요구 사항을 수정하며 요구 사항 기반 테스트를 구축할 수 있다.
멀티도메인 설계의 난점
오늘날 UAS 서브시스템 요구 사항의 대부분은 다른 서브시스템과 상호 의존성이 매우 높다. 하지만 전통적인 설계 과정 중에는 이러한 요구 사항이 전체 시스템 레벨의 영향과 관련하여 고려되지 않은 채 특정 서브시스템에 대해 최적화된다.
예를 들어 통신 시스템을 위한 서브시스템 요구 사항의 경우, 최대 BER(비트 오류율)을 지정하더라도 이러한 요구 사항을 충족하는 데 필요한 전력이 동일한 정황에서 고려되지 않는다. 이로 인해 전력 요구 사항이 검증되는 개발 후기에 설계를 불필요하게 수정해야 하는 일이 발생한다.
이러한 문제를 해결하기 위해 시스템 엔지니어는 반드시 시스템 수준에서 설계와 관련된 상반관계를 확인해야 하며, 하나의 서브시스템에 대한 변경이 다른 서브시스템과 전체 시스템의 성능에 미칠 수 있는 영향을 평가해야 한다.
의미 있는 결과를 제공하려면 설계 상반관계 연구에 서브시스템 레벨의 종속성을 파악할 수 있는 시스템 레벨 모델이 필요하다. 예를 들어 이미지 페이로드에 대한 일반적인 시스템 수준의 요구 사항은 비행 중 특정 수준의 비디오 전송 품질을 유지하는 것이다.
한가지 설계안은 UAS가 저전력 안테나를 통해 몇 밀리미터 내의 정확도로 대상을 추적할 수 있도록 지원하는 하이 게인의 정교한 제어 알고리즘이다. 극단적인 다른 대안으로는 고전력 안테나와 낮은 정확도의 대상 추적 알고리즘을 이용한 설계가 있다.
다른 설계 옵션에는 비디오 인코딩 체계 변경을 통해 전송 품질의 목표를 충족하는 옵션이 포함된다. 이러한 대안은 독립적이지 않기 때문에, 스프레드시트의 정적 분석을 사용하는 전통적인 설계 상반관계 수행 방식을 통해서는 차선의 설계 또는 요구 사항이 실현 불가능하다는 결론으로 이어질 수도 있다.
모델 기반 설계를 통해 엔지니어는 GNC 및 통신 모델을 상호 의존적인 다른 서브시스템 모델과 연결하여 실행 가능한 멀티도메인 시스템 레벨의 모델을 제작한다. 그런 다음 다양한 서브시스템 레벨 모델의 구성요소를 사용하고 파라미터 스윕(Parameter Sweep) 시뮬레이션을 실행함으로써, 출력 비디오 이미지 품질을 평가하여 어떤 설계 안이 시스템 레벨의 성능 요구 사항을 가장 잘 충족하는지 확인할 수 있다.
GNC 서브시스템 엔지니어가 제어 알고리즘을 개발할 때, 폐루프 성능 분석에 대한 제어 법칙(control law) 모델에 연결된 수학적 플랜트 모델을 사용하는 경우가 많다. 전통적으로 플랜트 모델은 시뮬레이션 환경에서 구현될 수 있도록 측정 데이터 또는 먼저 폐쇄 형식으로 풀려지는 1차 방정식으로부터 개발된다.
그러나 현대의 설계 도구들은 엔지니어가 시스템 구조를 반영하는 본체, 접합부, 제약 및 힘 요소로 구성된 안테나 메커니즘과 같은 플랜트 모델을 개발할 수 있도록 지원한다. 이 접근법을 사용하면 모델링 환경에서 모든 좌표 변환을 관리할 뿐 아니라 시스템의 기본 운동학 및 역학을 풀어, 엔지니어가 플랜트 모델을 활용한 시스템 성능의 이해와 포인팅 정확도 관련 요구 사항을 충족하기 위한 제어 알고리즘 개발에 더 집중할 수 있게 된다.
또한 제어 엔지니어는 폐루프 서브시스템 모델을 사용하여 보상기 및 개방 루프 감독 전략을 개발하고 분석할 수 있다. 이 모델은 엔지니어가 소프트웨어 구현에 앞서 단일 루프 및 다중 루프 제어 법칙을 체계적으로 조정할 수 있게 하기 때문에, 설계와 관련하여 시행 착오를 겪을 가능성이 줄어든다.
항공기가 목표에 정확히 포인팅되었는지 GNC 엔지니어가 확인하는 동안, 통신 엔지니어는 디지털 기저대역 및 무선 주파수(RF) 등 여러 도메인에 대해 작업하면서 안테나 기하학, 통신 프로토콜, 비디오 인코딩 체계를 고려해야 한다.
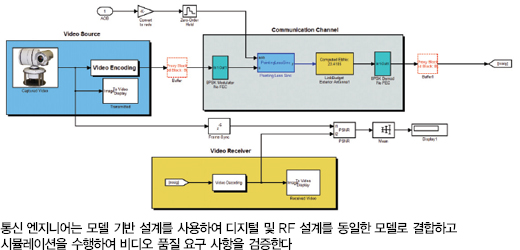
기존에는 데이터 전송을 위한 시스템 요구 사항을 충족하기 위해 엔지니어가 BER을 예측하는 데 필요한 스프레드시트를 사용하여 링크 버짓(link budget)을 구현했다. 엔지니어는 모델 기반 설계를 통해 정적인 링크 버짓에 의존하는 대신 시뮬레이션을 통해 전반적인 비디오 품질을 평가할 수 있으며, 이러한 작업은 현대의 압축 비디오 전송에서 특히 중요하다.
엔지니어는 실행 가능한 모델을 사용하여 통신 채널의 시스템 레벨 모델링을 수행하고 기저대역 신호 처리를 시뮬레이션 하여, 비디오의 품질을 평가할 수 있다. 그런 다음 파라메터 스윕 시뮬레이션을 통해 최악의 경우의 BER을 계산하여 전체 시스템(안테나, 포인팅 알고리즘 및 채널)의 신뢰성을 평가할 수 있다.
엔지니어는 GNC 및 통신 서브시스템 모델을 결합함으로써, 다른 제어 알고리즘, 안테나 기하학, 통신 프로토콜 및 비디오 인코딩 체계를 포함한 설계에 대한 시뮬레이션을 통해 시스템 수준의 상반관계 연구를 수행할 수 있다. 이러한 연구를 통해 엔지니어는 시스템 레벨에서 성능을 최적화할 수 있다.
요약
차세대 무인 항공 시스템의 시스템(UAS) 레벨 요구 사항을 충족하려면, 엔지니어는 더 이상 서브시스템 레벨에서 최적화를 수행하고 이를 전체 시스템에 통합하는 전통적인 접근법에 의지할 수 없다.
이제 엔지니어에게는 시스템 레벨 상반관계 분석을 수행하고 여러 서브시스템과 분야에서 있을 수 있는 설계 변경에 따른 영향을 관찰하여, 시스템 통합 문제를 방지하고 전체 시스템 성능이 요구 사항을 만족할 수 있도록 지원하는 도구가 필요하다.
MATLAB 및 Simulink의 모델 기반 설계는 다양한 분야의 엔지니어가 소프트웨어 내에서 설계를 구현하거나 하드웨어 프로토타입을 개발하기 전에, 시스템 레벨에서 설계를 최적화하고 높은 수준의 요구 사항을 검증하며 설계 상반관계 분석을 수행할 수 있도록 지원한다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>



